#!/sys/mopscript -f
puts "Hello from TCL"
proc fib {n} {
if {$n <= 1} {
return $n
}
expr [fib [expr $n-1]] + [fib [expr $n-2]]
}
puts [fib 20]
puts [exec /sys/sdutil -lpd -d /devices/ide0]
puts [exec_bg /sys/spin]Blog
TCL scripting in userspace
17 June 2026
In this blog post I’d like to take you through the process of how I added a simple way of writing scripts in MOP3 in userspace.
This side-quest was also an excuse for me to slack on the USB stack (EHCI/OHCI is still work in progress) and generally I needed a simple "quick-win", because of being way too busy with private life stuff.
The code for today: https://git.kamkow1lair.pl/kamkow1/mop3/src/branch/master/mopscript
Backstory
This is the lore of this side-quest.
Basically, I needed a basic scripting language to automate stuff in userspace, for eg. starting USB pollers, listing
out devices / processes after the system boots up and so on. ce (the shell) already supports that via it’s mediocre
"scripting capabilities", but that wasn’t enough. I needed a language that implements logic and flow control like if,
while, break, continue, for and so on. Also variables are pretty useful.
The final goal, which is not yet achieved, is to throw out the /sys/init.cmd ce script entirely and replace it with
the new more capable language. Possibly even replace ce itself and just move the edit editor into a separate application,
but those are plans for the far future.
Marking out the requirements
Firstly, I w wanted to make a list of interpreters to consider when building my scripting environment. I wanted to rely on existing interpreters, because writing one would take too much time and attention from the project and I would just get lost entirely on this side-quest.
After some research and planning, I’ve managed to mark out these requirements:
-
No custom / sophisticated build system allowed. You see, MOP3 uses it’s own way of building user applications via a build system made on top of sets of makefiles. This makes it super easy to write my own applications, but makes it super-duper difficult and annoying to port apps with their own special way of being built. Ideally I can just throw the interpreter’s source files into a directory, put
Makfile,src.mkandapp.mkin there and it will automagically integrate itself into the build process. -
Minimal / basic libc support requirement. MOP3’s
libuis a very small C library and is does not comply with the standard in a lot of ways. Some functions are standard though, which makes porting a little easier, but we must not assume full Linux / POSIX-compliant environment. -
Simple source code to be understood by one person within a short amount of time. I want something that I can quickly get a grasp of and extend / modify to my needs.
-
Generally okay performance, which also ties into 3.
Potential candidates
This is the list of projects that caught my eye during research:
-
MicroPython
-
Pros:
-
Is Python, so syntax will be familiar and the language will be easy to use.
-
Assumes bare-metal environment, so it would work with our minimal C library support.
-
-
Cons:
-
Has it’s own build system and way of porting to other platforms (
ports/), so it doesn’t integrate well into the proejct.
-
-
-
Berry
-
Pros:
-
I already have experience with the code base and have ported it before.
-
Simple python-like language.
-
Doesn’t require much in terms of C library support.
-
-
Cons:
-
Uses external tools to generate a parser, which makes the build process not straightforward.
-
-
-
MuJS
-
Pros:
-
Is JavaScript, so using it will be super easy.
-
Nice stack-based API for creating native C functions.
-
No build system. Just throw the .c files into the project and go!
-
-
Cons:
-
Requires a bit better C library support, because it assumes a hosted environment.
-
Suuuuper slow boot up time, due to object prototypes needing to be created.
-
-
-
PICOL (TCL)
-
Pros:
-
While I don’t know (at the time) TCL, it’s a simple language and I can learn it quickly.
-
Super simple codebase of ~500 LOCs.
-
Minimal C library support required.
-
Everything in one file and no sophisticated build system.
-
-
Cons:
-
A bit bare and will require a lot more work on my part to add useful features.
-
-
The winner
The winner is… MuJS? What? I thought we were doing TCL in this article?
MuJS - first try
MuJS was very easy to set up and get going. You just download the zipped release sources from their website and throw the files into your project. No build system, no generated configs, no nothing - just a bunch of .c files. Also in terms of required C library support, I only had to implement like 2-3 new string functions and that’s it.
Unfortunately it’s not so beautiful. As it turns out, MuJS is extremely slow to boot up. Once it’s running it’s quite fast, but the startup is very cold, which makes it not ideal for scripts. Why is this? MuJS at start needs to create all needed object prototypes and built-in classes, which does lots of micro allocations. I assume this is a design choice, because Artifex (company behind MuJS) wants the runtime to work under MuPDF, where the start up is already cold, so we can wait a second for the interpreter to start - and what really matters is interpreter speed, while it’s running. Makes sense, but I had to ditch MuJS unfortunately.
PICOL (TCL)
I’ve never had any experience with TCL programming haha. I randomly found PICOL on GitHub and saw that the implementation
is fairly simple and can be easily incorportated into the project (literally one file). It’s also super easy to add custom
commands using picol_register_command(). The boot up time of PICOL is actually non-existant and the whole interpreter
runs very smoothly.
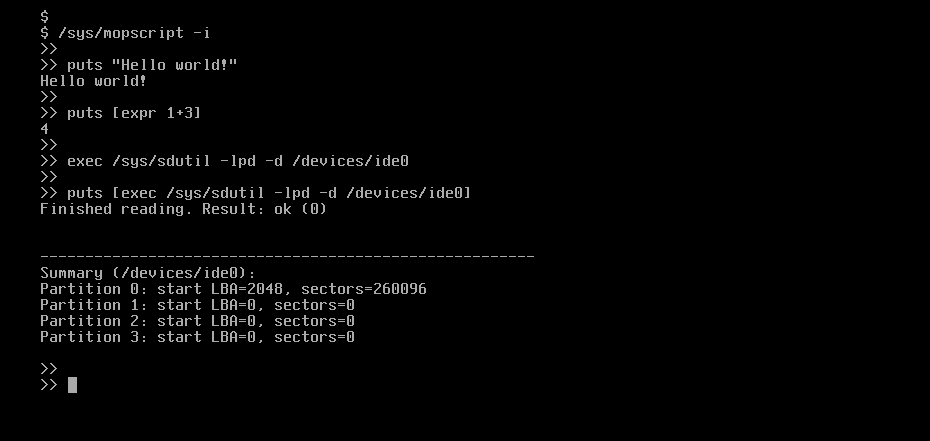
This is my playground script located in etc/hello.tcl:
As you can see, exec and exec_bg are custom added commands that do not come with PICOL by default.
Overall rating of PICOL
I really like this project and if you need an embedded scripting language, this is a nice option, mostly because of how easily it integrates into existing code.
RATING: ★★★★☆
SOURCE: https://github.com/antirez/picol
Showcase
Closing thoughts
What a lot of embeddable languages miss is the ability to integrate seemlessly into an existing codebase. What I look for in tools like this is the ability to simply throw the source files into my project and build them alongside my main code. This is what initially drew me to MuJS and made me stick with PICOL. I think more of interpreters like this should take that into consideration.
New priority-based round-robin scheduler
11 May 2026
Today I’d like to show you, how I’ve added priorities to MOP3’s round-robin scheduler!
Code to follow along:
Motivation
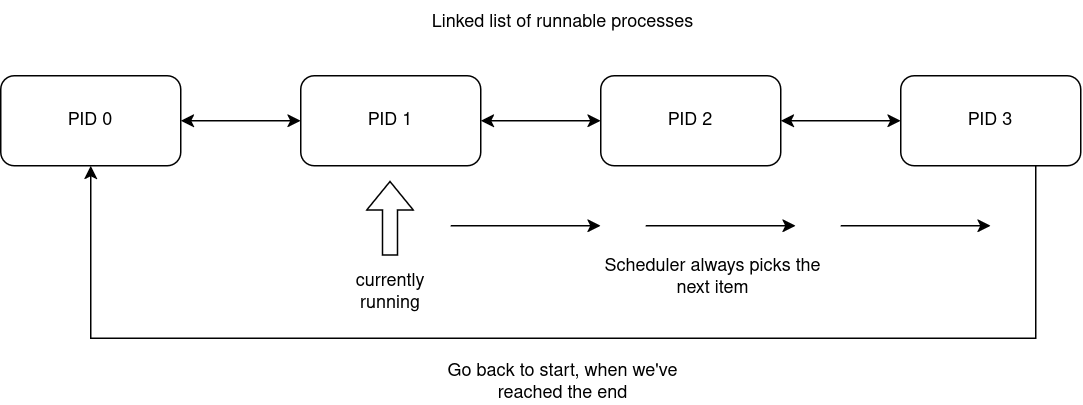
So far MOP3 was fine with a basic round-robin scheduler. If you don’t know, a round-robin scheduler is a scheduler that has a list of runnable processes and picks the next item from it to execute, but when the end is reached, the algorithm wraps around and starts from the first item.
Simple flow graph:
The issue
Round-robin is simple and easy to implement but quickly becomes insufficient as the operating system grows in features, subsystems and drivers, which increases the amount of concurrently running apps. By having no priorities, everything equates to the same priority. This means that your text editor, which you’re currently typing characters into is as important for the scheduler as a USB controller daemon/poller, which does actual work only for eg. when a new device is plugged in (which is very infrequent). By having priorities, we can tell the scheduler that this USB poller process can be run less frequently, than this other app and thus reallocate precious CPU time to more important tasks.
The catch
Priorities aren’t so obvious to implement into our scheduler. One major issue is that if there are some apps with higher priorities and an app with a lower priority, the lower one will be "starved" of CPU time - it won’t be scheduled, because there will always be a higher priority task to run.
How do we fix this?
-
Priority aging!
What is priority aging? It’s a technique, where a process has a certain priority, but it’s value "gets rewarded" over time. From the scheduler’s perspective, a process has been waiting for long enough that the scheduler "feels bad" and was to move a process up front.
Modifying struct proc
New struct proc
struct proc {
int pid;
int exec_pid;
struct rb_node_link proc_tree_link;
struct rb_node_link procgroup_memb_tree_link;
struct list_node_link cpu_run_q_link;
struct list_node_link* sq_entries;
struct procgroup* procgroup;
struct proc_platformdata pdata;
uint32_t flags;
struct cpu* cpu;
int state;
uintptr_t uvaddr_argument;
struct proc_suspension_q done_sq;
char name[PATH_MAX + VOLUME_MAX];
char cwv[VOLUME_MAX];
/* ------------------------------------------ */
int priority; // !! <-- base priority
int dynamic_priority; // !! <-- rewarding priority
};We’ve added these two new fields: the base priority number and the rewarding priority number. Our priority system will be reversed if you’re used to UNIX-style priorities, ie. our priorities can be taken at face value. UNIX priorities are: higher number = worse, lower number = better, which is quite counter-intuitive. We’ll be using priority numbers to denote actual priority in a logical sense (more = good, less = bad).
New scheduling algorithm
Listing for proc_find_sched()
/* This is our function to figure out the next process to run on a given CPU */
static struct proc*
proc_find_sched(struct cpu* cpu) {
if (!cpu->proc_run_q)
return NULL;
/* first process from our run queue list */
struct list_node_link* current = cpu->proc_run_q;
struct proc* best_proc = NULL;
int highest_prio = -1; /* some very low priority value */
do {
struct proc* proc = list_entry(current, struct proc, cpu_run_q_link);
/* Is process ready? */
/* (We also don't want to run kernel processes, because those are stubs for other subsystems) */
if (proc->state == PROC_READY && !(proc->flags & PROC_KPROC)) {
/* Here we want to first pick the most suffering process */
if (proc->dynamic_priority > highest_prio) {
highest_prio = proc->dynamic_priority;
best_proc = proc;
}
if (proc->dynamic_priority < 100)
proc->dynamic_priority++;
}
/* pick next or wrap */
current = current->next ? current->next : cpu->proc_run_q;
} while (current != cpu->proc_run_q);
if (best_proc == NULL)
return NULL;
if (cpu->proc_current->cpu_run_q_link.next)
current = cpu->proc_current->cpu_run_q_link.next;
else
current = cpu->proc_run_q;
struct list_node_link* start = current;
/* Now we do normal round-robin among processes with highest priority */
do {
struct proc* proc = list_entry(current, struct proc, cpu_run_q_link);
if (proc->state == PROC_READY &&
!(proc->flags & PROC_KPROC) &&
proc->dynamic_priority == highest_prio) {
/* back to base priority */
proc->dynamic_priority = proc->priority;
return proc;
}
/* pick next or wrap */
current = current->next ? current->next : cpu->proc_run_q;
} while (current != start);
return NULL;
}This is it! We’ve just implemented priorities!
User customizability
Now to let the user apps customize their priorities, we add new syscalls: get_priority and set_priority.
New syscalls
/* int set_priority(int prio) */
DEFINE_SYSCALL(sys_set_priority) {
int prio = (int)a1;
if (prio > PRIORITY_MAX)
prio = PRIORITY_MAX;
proc->priority = prio;
return SYSRESULT(ST_OK);
}
/* int get_priority(void) */
DEFINE_SYSCALL(sys_get_priority) { return SYSRESULT(proc->priority); }Syscall table
static syscall_handler_func_t handler_table[] = {
/* ... */
[SYS_SET_PRIORITY] = &sys_set_priority,
[SYS_GET_PRIORITY] = &sys_get_priority,
};Example in the USB poller
In the story at the start of the article, I’ve talked about the USB poller problem. It’s actually the reason I’ve decided to implement priorities into the scheduler. Here’s how we can utilize the new syscalls:
USB poller
#include <...>
static bool cmdline_poll = false;
static char cmdline_dev[CMDLINE_OPT_VALUE_MAX];
static struct cmdline_opt cmdline_opts[] = {
CMDLINE_OPT("p", "poll", CMDLINE_OPT_VALUE_BOOL, false, &cmdline_poll),
CMDLINE_OPT("d", "device", CMDLINE_OPT_VALUE_STRING, false,
(char*)cmdline_dev),
CMDLINE_END(),
};
static void
usb_poll(void) {
/* PRIORITY_LOW = 5, which is sufficient for system services and background tasks */
set_priority(PRIORITY_LOW);
for (;;) {
int r =
device_do(cmdline_dev, XUSBCTRL_POLL_DRIVER, NULL, NULL, NULL, NULL);
if (r == -ST_NOT_FOUND)
return;
}
}
void
app_main(void) {
if (cmdline_parse(get_cmdline(), cmdline_opts) < 0) {
mprintf("Failed to parse commandline arguments\n");
return;
}
if (cmdline_poll) {
usb_poll();
}
}Reversed priorities
Now that we have priorities up and running, there’s a still small issue. MOP3 has a mutex API, allowing processes to synchronize and enter critical sections exclusively, which is essential to writing good multithreaded code.
When one process owns a mutex, other processes that try to hold it too, fail and have to be put to sleep mode until they can receive the mutex. This is so that a process doesn’t spin mindlessly in place (there’s place and time for spinlocks though, but not here and not today).
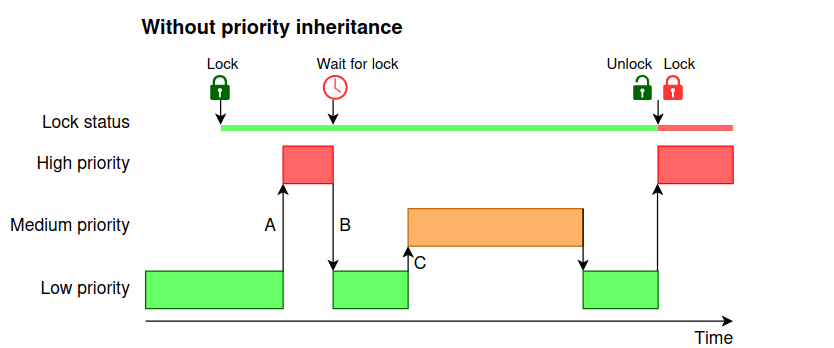
Mutexes don’t play nice with priorities, because they can actually reverse them!
The core issue is that a higher priority task is blocked by a lower priority task.
This is quite complicated to explain via text, so I’ll leave this diagram here:
Coding it up
Our mutex struct is quite simple:
struct proc_mutex {
struct proc_resource* resource;
bool locked;
struct proc_suspension_q suspension_q;
struct proc* owner;
};We don’t change anything here.
Lock function
void
proc_mutex_lock(struct proc* proc, struct proc_mutex* mutex,
struct reschedule_ctx* rctx) {
if (!mutex->locked || mutex->owner == proc) {
mutex->locked = true;
mutex->owner = proc;
return;
}
/* If our priority is better, boost the owner. We need to reschedule, so that
* the owner runs with new priority.
*/
if (proc->dynamic_priority > mutex->owner->dynamic_priority) {
mutex->owner->dynamic_priority = proc->dynamic_priority;
rctx_insert_cpu(rctx, mutex->owner->cpu);
}
proc_sq_suspend(proc, &mutex->suspension_q, rctx, NULL, NULL);
}Unlock function
void
proc_mutex_unlock(struct proc* proc, struct proc_mutex* mutex,
struct reschedule_ctx* rctx) {
if (mutex->owner != proc) {
return;
}
/* If we aged, while holding the mutex, bring the priority back down */
if (proc->dynamic_priority > proc->priority) {
proc->dynamic_priority = proc->priority;
rctx_insert_cpu(rctx, proc->cpu);
}
struct list_node_link* node = mutex->suspension_q.proc_list;
if (node) {
struct proc_sq_entry* sq_entry =
list_entry(node, struct proc_sq_entry, sq_link);
struct proc* resumed_proc = sq_entry->proc;
mutex->owner = resumed_proc;
mutex->locked = true;
proc_sq_resume(resumed_proc, sq_entry, rctx, 0);
return;
}
mutex->locked = false;
mutex->owner = NULL;
}Cleanup
void
proc_cleanup_resource_mutex(struct proc_resource* resource,
struct reschedule_ctx* rctx) {
struct proc_mutex* mutex = &resource->u.mutex;
/* if the owner has aged, bring back it's priority */
if (mutex->owner != NULL && mutex->locked) {
if (mutex->owner->dynamic_priority > mutex->owner->priority) {
mutex->owner->dynamic_priority = mutex->owner->priority;
rctx_insert_cpu(rctx, mutex->owner->cpu);
}
}
while (mutex->suspension_q.proc_list != NULL) {
struct list_node_link* node = mutex->suspension_q.proc_list;
struct proc_sq_entry* sq_entry =
list_entry(node, struct proc_sq_entry, sq_link);
struct proc* suspended_proc = sq_entry->proc;
proc_sq_resume(suspended_proc, sq_entry, rctx, 0);
}
mutex->locked = false;
mutex->owner = NULL;
}Adding DMA support to an IDE driver
30 April 2026
In this article I’d like to show you, how I’ve added DMA support to MOP3’s IDE driver!
Code to follow along:
Terminology
-
PRD = Physical Region Descriptor
-
PRDT = Physical Region Descriptor Table
-
DMA = Direct Memory Access
PCI initialization
We initialize the IDE driver from the PCI layer, so we need to enable some stuff in order to get DMA support.
uint16_t pci_cmd = pci_read16(pci_info.bus, pci_info.slot, pci_info.func, PCI_COMMAND);
uint16_t new_cmd = pci_cmd;
new_cmd |= (1 << PCI_CMD_IOSPACE);
new_cmd |= (1 << PCI_CMD_BUSMASTER); // <---- HERE!
new_cmd &= ~(1 << PCI_CMD_INTRDISABLE);
if (pci_cmd != new_cmd) {
pci_write16(pci_info.bus, pci_info.slot, pci_info.func, PCI_COMMAND, new_cmd);
}We need to enable bus mastering. By flipping bit 2. This allows the device to talk to our memory via provided addresses.
We also must get the port number, which we’ll be using to configure our DMA transfers. This info is
located in BAR4+0 for primary IDE channel and BAR4+8 for secondary.
uint32_t bar4 = pci_read32(pci_info.bus, pci_info.slot, pci_info.func, PCI_BAR4);
uint16_t bmbase = (uint16_t)(bar4 & 0xFFFC);
bm_support = (bmbase != 0) && (bar4 & PCI_BAR_IO);We of cource then have to pass bmbase and bm_support to our IDE driver init function and now we just have to modify the driver itself to work with that.
The driver
Structures
We first need to prepare some structs before we write the rest of the code.
Physical Region Descriptor struct
// PRD
struct ide_prd_entry {
uint32_t phys_addr;
uint16_t size;
uint16_t rsvd_eot;
} PACKED;This is our Physical Region Descriptor (PRD) struct. It holds info about DMA transfers. phys_addr
tells the hardware what memory to use - for reading, it will write memory there and for writing,
it will copy memory from there. size is the size of the data. PRDs can hold up to 64KiB of
data, so we’ll have to split our transfers across 64KiB chunks. rsvd_eot is a marker for the
hardware to know when it has reached the end of the PRD list and to stop processing further.
IMPORTANT: phys_addr is a 32 bit pointer, so we MUST assert that this address is under 4GiB.
Otherwise it will truncate and make the hardware read/write to/from somewhere else entirely.
We also must ensure that the physical memory we allocate for the PRD is continuous, meaning
that there’s no gaps/fragmentation.
IMPORTANT 2: We must also note that size = 0 actually means size = 64KiB.
New IDE drive struct
struct idedrv {
struct device* device;
bool lba48;
size_t sector_count;
size_t sector_size;
uint16_t io, ctrl;
uint8_t devno;
uint8_t irq;
struct idedrv_request* current_req;
bool irqs_support;
/* New fields */
uint16_t bmbase; /* From BAR4 */
bool bm_support; /* From PCI layer */
struct ide_prd_entry* prdt; /* Virtual pointer to Physical Region Descriptor Table */
uintptr_t prdt_phys; /* physcal PRDT address */
size_t prdt_entry_count; /* Max count of PRDs */
uintptr_t bounce_buffer_phys; /* Bounce buffer used to move data between hardware and OS */
void* bounce_buffer;
};Initialization
Instead of allocating every time we try to read/write, why not just pre-allocate all the needed memory?
Bits of idedrv_init
idedrv->bm_support = init->bm_support;
if (idedrv->bm_support) {
idedrv->prdt_phys = pmm_alloc(1);
if (idedrv->prdt_phys >= 0xFFFFFFFF) {
pmm_free(idedrv->prdt_phys, 1);
free(idedrv);
return false;
}
idedrv->prdt_entry_count = PAGE_SIZE / sizeof(struct ide_prd_entry);
idedrv->prdt = (struct ide_prd_entry*)((uintptr_t)hhdm->offset + idedrv->prdt_phys);
idedrv->bounce_buffer_phys = pmm_alloc_aligned(64, 16);
if (idedrv->bounce_buffer_phys >= 0xFFFFFFFF) {
pmm_free(idedrv->bounce_buffer_phys, 64);
pmm_free(idedrv->prdt_phys, 1);
free(idedrv);
return false;
}
idedrv->bounce_buffer = (void*)((uintptr_t)hhdm->offset + idedrv->bounce_buffer_phys);
}Now our driver supports 4096 / 8 = 512 PRDs → 1 PRD = 64KiB → 32 MiB of data transfered at one time.
Reading and writing
Here I’m going to focus on reading and writing with IRQ support enabled, although there are variants of read/write functions which handle the case where IRQs are not enabled.
First we must prepare the PRDs:
size_t rem = sector_count * idedrv->sector_size;
uint32_t phys = idedrv->bounce_buffer_phys;
size_t prd_idx = 0;
while (rem > 0 && prd_idx < idedrv->prdt_entry_count) {
uint32_t chunk = (rem >= 0x10000) ? 0x10000 : rem;
idedrv->prdt[prd_idx].phys_addr = phys;
idedrv->prdt[prd_idx].size = (uint16_t)chunk; // If chunk is 64KiB, it will overflow to 0
rem -= chunk;
phys += chunk;
idedrv->prdt[prd_idx].rsvd_eot = (rem == 0) ? 0x8000 : 0x0000; // nothing has remained, so mark as End Of Table
prd_idx++;
}Then we tell the hardware where are the PRDs physically:
outl(idedrv->bmbase + IDE_DMA_REG_PRDT, (uint32_t)idedrv->prdt_phys);Tell if we’re reading or writing. Send 0x08 to set reading mode.
outb(idedrv->bmbase + IDE_DMA_REG_CMD, 0x08);Clear error/interrupt bits of status register
outb(idedrv->bmbase + IDE_DMA_REG_STATUS, status | IDE_DMA_STATUS_INTR | IDE_DMA_STATUS_ERROR);Prepare position and sector count and enable interrupts
ide_prepare(idedrv, sector, sector_count, true);Send the right DMA read (or write) depending on LBA48 support.
uint8_t cmd = idedrv->lba48 ? IDE_CMD_READ_DMA48 : IDE_CMD_READ_DMA28;
outb(idedrv->io + IDE_REG_CMD, cmd);
outb(idedrv->bmbase + IDE_DMA_REG_CMD, 0x08 | 0x01); // Start DMA engineWe can the finally copy the received data from the bounce buffer:
if (idedrv->bm_support)
memcpy(buffer, idedrv->bounce_buffer, sector_count * idedrv->sector_size);Of course, for writing we must first copy into the bounce buffer.
Interrupt handler
Inside the handler there were a few changes to be made.
Acknowledge the interrupt by reading status and clearing intr/error bits:
uint8_t bm_status = inb(idedrv->bmbase + IDE_DMA_REG_STATUS);
if (!(bm_status & IDE_DMA_STATUS_INTR))
return;
outb(idedrv->bmbase + IDE_DMA_REG_STATUS,
bm_status | IDE_DMA_STATUS_INTR | IDE_DMA_STATUS_ERROR);And then after we’re done processing the interrupt, we must stop the DMA engine:
outb(idedrv->bmbase + IDE_DMA_REG_CMD, 0x00);
atomic_store(&req->done, 1);
idedrv->current_req = NULL;Conclusion and testing
In conclusion, adding DMA support was fairly easy. I’ve put it off for a long time, because I was a bit scared to tackle it and didn’t understand the subject that well, but after having written the XHCI driver (which is all about DMA), I felt pretty confident!
After having tested the driver for a bit on real hardware, there is a definitive performance boost!
As a benchmark I’m using sys:/sdutil -format-fat32 -d ide0, which now takes up to a minute on a 32GiB
drive, where previously it was 2-3 minutes.
Kernel Big Lock Pattern
27 April 2026
This is going to be a controversial post, but hear me out!
Also, this posts relates to a previous one, so check it out too! https://www.kamkow1lair.pl/blog/MOP2/mutex-sync.html
Synchronization
A big portion of a working kernel is the synchronization code.
In a fairly modern OS, you’d want to support SMP or Symmetric Multiprocessing (multiple cores), so that the user experience doesn’t feel clogged up. Also you can run more tasks concurrently.
Synchronization (or lack thereof ) is also a HUGE source of bugs, known as race conditions. What is a race condition? A race condition is, when two concurrent tasks try to work with the same resource, at the same time, for eg. one tasks modifies a variable, while another one reads it - then the reader may read a partially-correct value, leading to broken state.
So what do you do then?
You implement LOCKS.
There are many types of locks, but today we’ll focus on two types: big / and fine-grained.
Big vs. fine-grained locks
What’s the difference?
The difference is scope / domain. Big locks don’t care about scope, they just restrict access to entire subsystems or even the entire kernel. An example of this would be NetBSD, which had a big project, aiming to "modernize" their networking code (ref: https://wiki.netbsd.org/projects/project/smp_networking/). This is a consequence of building on top of 4.4 (4.3?) BSD kernel, which were built in times, where SMP hardware was quite unpopular, so it took a lot of effort to rewrite the system in an SMP-friendly manner. All BSD systems have suffered from this and even pre-2.36 Linux.
All of these systems have switched to fine-grained locking, which on paper is better, because you have many tiny locks, which span over little critical sections. This allows the kernel to not block other CPUs/tasks for too long, which makes the system faster / able to handle more throughput.
The main idea here is that big locks are considered "bad". And yes, they are in a sense that they make critical sections system-wide, but on the other hand, they make concurrent code easier to reason about (there’s nothing to reason about) and maintain. Of course, this comes with a performance penalty, but check this out:
Nobody cares
Or at least in scenarios, like mine.
Why the big lock suits MOP3 better?
Fine-grained locking, while giving a big performance boost, is hard (really hard) and even pro-sigma-h4x0r-67 Linux kernel devs can’t get it right at times. When you have so many locks, it’s easy to loose your mind and forget things.
A big lock is not an issue for MOP3, because
-
it’s a hobby OS, so there’s no pressure to squeeze out best performance imaginable
-
there’s no performance penalty due to lack of code to perform (not enough apps, drivers and so on)
Lock hierachies
Also one thing to keep in mind about fine-grained locks is the lock hierarchy. What is it?
ABBA deadlocks
Picture this:
-
Task 1 takes lock A
-
Task 2 takes lock B
-
Task 1 takes lock B, but B is taken, so it waits
-
Task 2 takes lock A, but A is taken, so it waits
Now there’s a circular dependency - Task 1 depends on Task 2 to release it’s lock and Task 2 depends on Task 1. DEADLOCK!!!
So what do you do? You have to ensure a lock hierarchy - lock B must ALWAYS be held under lock A; doing otherwise will lead to issue presented above.
Obviously big locks don’t have such issue, because there’s no other locks :)
What changes in the code?
Now we need to answer the question: when do we hold the big lock?
-
On kernel entry in: interrupt handlers* and syscalls
The syscalls look like this now:
extern void syscall_entry(void);
static uintptr_t syscall_dispatch1(void* stack_ptr) {
struct saved_regs* regs = stack_ptr;
struct proc* caller = thiscpu->proc_current;
int caller_pid = caller->pid;
memcpy(&caller->pdata.regs, regs, sizeof(struct saved_regs));
fx_save(caller->pdata.fx_env);
int syscall_num = regs->rax;
syscall_handler_func_t func = syscall_find_handler(syscall_num);
if (func == NULL) {
return -ST_SYSCALL_NOT_FOUND;
}
struct reschedule_ctx rctx;
memset(&rctx, 0, sizeof(rctx));
lapic_timer_mask();
intr_enable();
uintptr_t r =
func(caller, regs, &rctx, regs->rdi, regs->rsi, regs->rdx, regs->r10, regs->r8, regs->r9);
intr_disable();
lapic_timer_unmask();
caller = proc_find_pid(caller_pid);
if (caller != NULL) {
caller->pdata.regs.rax = r;
}
bool do_thiscpu = false;
for (size_t i = 0; i < lengthof(rctx.cpus); i++) {
if (rctx.cpus[i] != NULL && rctx.cpus[i] != thiscpu)
cpu_request_sched(rctx.cpus[i], true);
else
do_thiscpu = true;
}
if (do_thiscpu)
cpu_request_sched(thiscpu, true);
return r;
}
uintptr_t syscall_dispatch(void* stack_ptr) {
load_kernel_cr3();
biglock_lock();
uintptr_t r = syscall_dispatch1(stack_ptr);
biglock_unlock();
return r;
}We lock before entering a syscall and unlock on exit. Don’t worry, cpu_request_sched will unlock before it loses context due to switching. We also must enable interrupts during syscalls, so that device drivers can work properly. Other than that, not much has changed.
/* Handle incoming interrupt, dispatch IRQ handlers. */
void intr_handler(void* stack_ptr) {
load_kernel_cr3();
struct saved_regs* regs = stack_ptr;
if (regs->trap <= 31) {
intr_exception(regs);
} else {
bool user = false;
if (regs->cs == (GDT_UCODE | 0x3)) {
biglock_lock();
user = true;
struct proc* proc_current = thiscpu->proc_current;
memcpy(&proc_current->pdata.regs, regs, sizeof(struct saved_regs));
fx_save(proc_current->pdata.fx_env);
}
lapic_eoi();
struct irq* irq = irq_find(regs->trap);
if (irq == NULL) {
if (user)
biglock_unlock();
return;
}
struct reschedule_ctx rctx;
memset(&rctx, 0, sizeof(rctx));
irq->func(irq->arg, stack_ptr, user, &rctx);
if (user) {
bool do_thiscpu = false;
for (size_t i = 0; i < lengthof(rctx.cpus); i++) {
if (rctx.cpus[i] != NULL && rctx.cpus[i] != thiscpu)
cpu_request_sched(rctx.cpus[i], user);
else
do_thiscpu = true;
}
if (do_thiscpu)
cpu_request_sched(thiscpu, user);
biglock_unlock();
}
}
}Now here things get a little more interesting. We lock as before, but we do so only in the case of an interrupt incoming, while we previously were in user-space. This is because when in kernel-space we’re already under the protection of the Big Lock. Locking in such circumstance would lead to a deadlock, because we would retake the same lock and block ourselves.
Conclusion
In conclusion, MOP3 will from now on use the Big Lock, because it’s easier to maintain as a solo developer and the penalty doesn’t affect the system, because of it’s premises - being a hobby OS and lacking sophisticated software stacks, which would require better performance/control.
Hope you’ve learned something useful about big locks vs. fine-grained locks!
EDIT 1
Funnily enough, after some testing and playing around with the system, I’ve found that the big lock actually has improved performance significantly?
Why?
I think it’s due to previously having a lot of spin locks, which equate to a huge amount of atomic reads/writes. Such operations on x86 may cause a performance problem, because they have to be synced across all cores. Having a big lock once on entry and big unlock on exit reduces the amount of these operations. That’s just speculation, I don’t have any real numbers to back this up; it’s all based on anecdotal feel of the system, while using it and running test apps.
Fighting the BIOS (me vs. American Megatrends)
16 March 2026
Hello!
Recently MOP3 has received BIG updates: a PCI subsystem and an IDE driver, so now we can write to
persistent storage and keep our files there! How awesome? Because of that, I needed to have a
userspace utility app to manage drive partitions and filesystems. The app is called sdutil and
it’s code can be found here: https://git.kamkow1lair.pl/kamkow1/mop3/src/branch/master/sdutil.
It’s a very simple app, similar to old-school fdisk.
sdutil explained
sdutil or "storage device utility" is an app to manage filesystems and partitions on a device.
Right now it supports DOS partitions/MBR, but I plan to add GPT in the future too!
Testing sdutil on real hardware
I always make sure everything works by testing my code on a real machine. QEMU is nice for quick, iterative development, but you have to run you code in a not so nice and sterile environment. That’s how some bugs come up, which you’d never encounter in an emulator.
To test sdutil I’d run the following sequence of commands:
-
List DOS partitions (should be empty)
-
Create 1 DOS partition (from LBA 1, to the end) and leave the rest uninitialized
-
Reboot, because partition rescan is unimplemented yet
-
Check if the kernel has picked up the new partitions
-
Format the partition as FAT32
-
Mount as a volume and test createing/editing/deleting files
-
Reboot and see if the changes persist
After step 2, I could NOT BOOT into my machine! WHAT???
Yeah…
I could not boot, because there was no boot menu. It was simply gone! Here’s a photo (excuse the bad quality):
 ??????
??????
How does the boot menu disappear?
So after some digging in my code and debugging, I’ve figured it out…
The BIOS scans available devices, so that it can populate the boot menu with various options to boot from. It will see a SATA drive and so it will try to get it’s first sector and parse it as a Master Boot Record to find other bootable partitions. This is why GPT still has a legacy MBR btw. The issue here was that the American Megatrends' BIOS would try to parse my faulty MBR and instead of failing and just skipping the device, it would just hang before rendering the boot menu. WHY?? I don’t know, go ask AT.
Cleaning up the mess
So what’s the solution? My machine is bricked!
Well… Not quite. It is bricked as in the BIOS software breaks when parsing the MBR, but we can unbrick the PC if we manage to wipe the MBR out.
I had to carefuly remove the 32GB M.2 drive. Here’s what it looks like:

It’s well past february of 2026, so we’re fine ;).
Then I had to go to a local electronics shop and buy an M.2 SATA → USB adapter. The plan is to simply plug
the M.2 drive like an USB stick into my dev machine and use dd to wipe it out.
130 PLN/ZŁ later I have this:


Now we can clear the drive with dd. It takes like 10 minutes to do so.
And now WE CAN FINALLY HAVE THE BOOT MENU!! LET’S GOOOO

So why was the MBR bad?
When writing sdutil I’ve made a big and bold assumption that a modern BIOS would not care about
CHS (Cylinder-Head-Sector) related fields of partition table entries (PTEs). I was only initializing
LBA-related fields and it worked fine on QEMU, which uses SeaBIOS.
struct dos_pte {
uint8_t drive_attrs;
uint8_t chs_start_addr[3]; /* <-- uninitialized / zero */
uint8_t part_type;
uint8_t chs_last_sect_addr[3]; /* <-- uninitialized / zero */
uint32_t start_lba; /* <-- initialized properly */
uint32_t sector_count; /* <-- initialized properly */
} __attribute__ ((packed));
struct dos_mbr {
uint8_t boot_code[440];
uint8_t signature[4];
uint8_t resv[2];
struct dos_pte ptes[4];
uint8_t valid_sign[2];
} __attribute__ ((packed));What I did to fix this, was basically I’ve set up the CHS fields to mean the same as LBA. Here’s a simple conversion function in C:
static void lba_to_chs (uint32_t lba, uint8_t chs[3]) {
uint32_t sectors_per_track = 63;
uint32_t heads = 255;
uint32_t cylinder = lba / (heads * sectors_per_track);
uint32_t head = (lba / sectors_per_track) % heads;
uint32_t sector = (lba % sectors_per_track) + 1;
if (cylinder > 1023) {
chs[0] = 254;
chs[1] = 0xFF;
chs[2] = 0xFF;
} else {
chs[0] = (uint8_t)head;
chs[1] = (uint8_t)((sector & 0x3F) | ((cylinder >> 2) & 0xC0));
chs[2] = (uint8_t)(cylinder & 0xFF);
}
}And now we just have to pass the CHS fields into this function. Now everything works! YAY!
Wrapping up
So what’s the conclusion for to day?
-
Be careful when working with American Megatrends' BIOSes
-
Be ready to spend money to save your drives
-
Don’t assume that legacy fields are irrelevant
Generic update
02 March 2026
A lot has changed since last update… The operating system now has:
-
working userspace shell along with various utility commands
-
mailing IPC system
-
PS/2 keyboard driver
-
graphical terminal
-
FAT16/32 drivers
There were a lot of changes made sort of at one moment, so that’s why I haven’t blogged about them. To have a shell you’d need a terminal driver, to type commands - a keyboard driver and to glue all of this together - an IPC mechanism of some sort. Just to get to a working shell you need to cover a lot of OSDev areas at once, which wouldn’t IMO make for a good read.
Right now my goal is to implement more shell commands, which still unfortunately won’t make for an interesting article. It’s mostly just busy work - add a "file delete" command, add a "directory create" command and so on. Nothing innovative nor worth talking about.
One thing may be interesting though regarding the shell. It would be a "find/search" command with grep-like functionality or perhaps a regex engine (?). This would actually involve some true algorithm work and thus allow me to farm more content.
Another thing on my list is to port a (real) programming interpreter - so far wren and berry have been decent cadidates, but we’ll see. I want to keep the shell more of a command prompt, rather than someting programmable with ifs and fors. I generall dislike bash/unix shell - it allows for some truly unhinged programming, which shouldn’t be the role of such tool. Leave programming to programming languages and basic commands to shells.
To conclude: I’m locked in now and not in a mood for writing this poetry, yet I still feel like I have to. I have to, so I don’t lose form and so that maybe the two people in the entire world have something cool to read.
See you in the next post!
Running my kernel on real hardware
08 February 2026
Developing a custom operating system is notoriously difficult. These days we have awesome developer tools such as QEMU or Bochs. Despite that, those tools can sometimes turn out to be faulty or simply not show the entire truth about the running OS - especially QEMU, which while works, is a little too loose and allows for some correctness issues to slip in (in regards to CPU features, stack alignment, device drivers and so on). Because of that, it’s very important to test once in a while on real hardware - the code MUST be correct for it to work.
At the end I’ll tell a short and funny story about my personal experience with QEMU ;).
In search for the right hardware
Of course we’re talking about x86/PC machines here
The right hardware will be either very easy or really difficult to buy depending on what platform you’re developing for.
If your OS is 32 bit (ie. runs on i386-based machines) then you’ve got a problem. 32 bit machines are hard to get these days and are quite expensive due to their high collector value and vintage/retro freaks willing to overpay for this electronic scrap. I myself own 2 32 bit intel machines - Pentium S and the OG i386DX, but they barely work and I doubt they could handle constantly smashing the reset button and rebooting.
64 bit machines are more modern (duh!) and thus you get a lot of quality-of-life features like USB booting, which is miles better than writing floppies or CD disks, just to find out your kernel doesn’t work and discard them, producing a mound of plastic garbage in the process.
Just because a machine is 64 bit, it doesn’t make it better for development! A CPU is not everything, it is rather just one of many puzzle pieces, which make up the entirety of the PC. This is why you have to mind what peripherals your machine offers. A lot of modern PCs don’t have legacy PS/2 ports or a serial port - and you can forget about LPT (rip). Everything is USB these days, which means that to have some simple debug printing (or just any output for that matter) you will need a graphics driver or a USB driver to send data. As you can imagine, this is really difficult to have when your OS is taking it’s baby steps, while a serial PC driver is like 30 lines of code. That’s why it’s important to have these simple, primitive, yet super useful peripherals available.
HP Thin Client T730


This is my machine of choice for this project. It’s 64 bit, has all the cool legacy peripherals (a serial port most importantly) and is very small/light. As you can see it easily fits on my table and doesn’t require too much space. Also a big plus is that if I get bored of OS dev eventually, I can use it as a secondary node in my home cloud infra.
Specs include:
-
32 GB hard drive; I can mount it out and use a bigger SSD, but I don’t need to for now
-
AMD RX-427BB
-
8 GB of RAM
-
2 serial ports
-
LPT port
-
PS/2 mouse and keyboard
Overall this mini PC is a big steal! It was only ~ 250 PLN or ~ 70 USD!
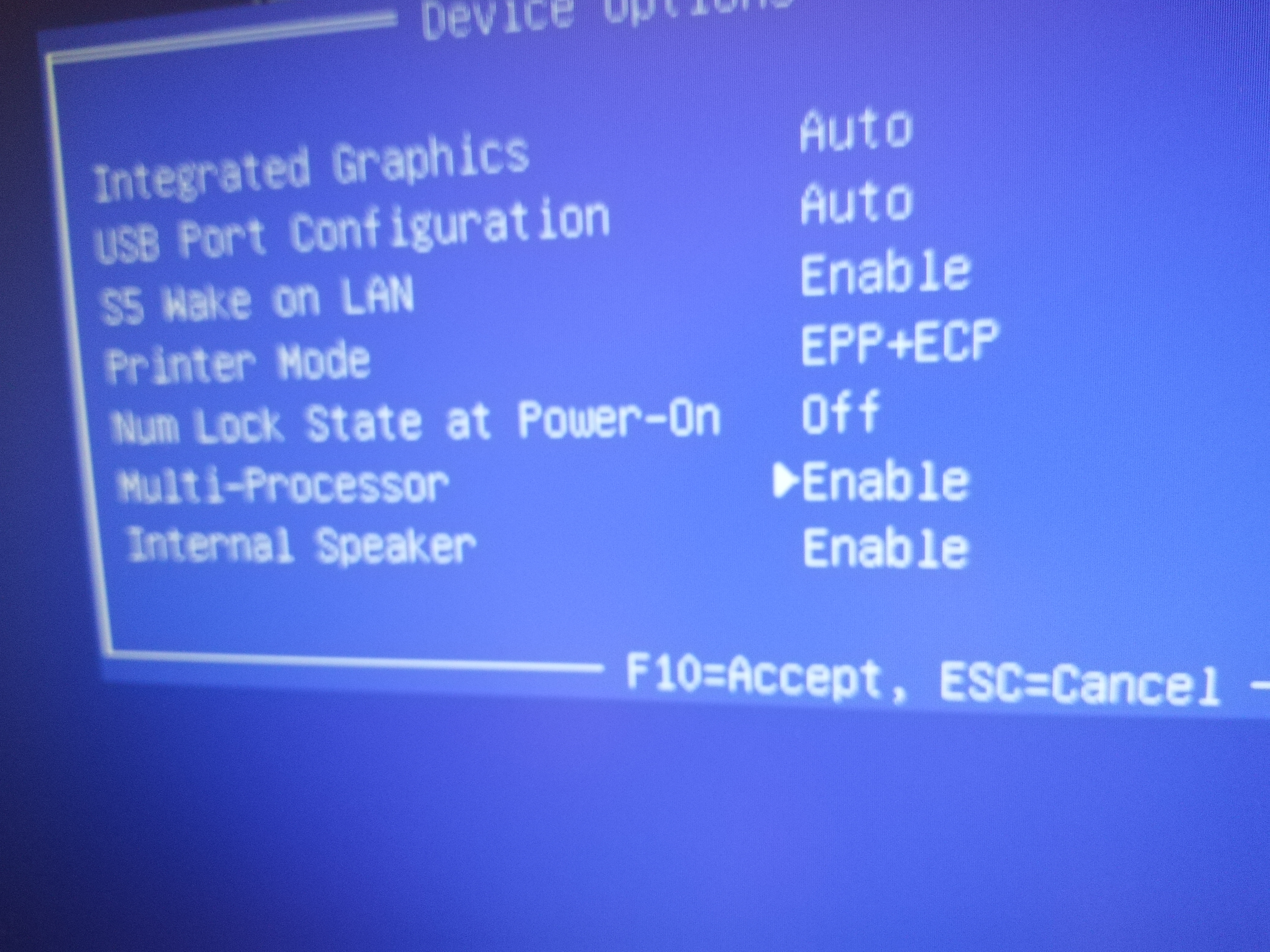
Also this BIOS feature is really important to me - multiprocessor or SMP support on/off. This is amazing for testing the correctness of SMP code, both in single core and multi core environment. May seem like a basic thing, but actually not many BIOSes support this.
Showcase
Implementing TLS (Thread Local storage) for x86_64
31 January 2026
In this article I’d like to explore the implementation details of thread local storage on x86_64/amd64 for my operating system with compliance to System V ABI.
full code is as always at: https://git.kamkow1lair.pl/kamkow1/MOP3
Preface
We’re going to implement the bare working minimum of the ABI, just enough to make thread
keyword work in Clang and GCC. The spec is more complicated than that. We’re going to implement static
TLS (there’s also dynamic TLS, you can look up tls_get_addr if you’re interested in going further).
Also I’d like to share this article as a very useful resource regarding the TLS: https://maskray.me/blog/2021-02-14-all-about-thread-local-storage. It’s more generally about TLS, but made for a great learning resource for me and I really recommend you read it too.
Other resources:
-
Spec reference: https://uclibc.org/docs/tls.pdf
-
OSDev Wiki: https://wiki.osdev.org/Thread_Local_Storage
What is thread local storage?
Thread local storage is a type of storage in a multitasked application, where each task has it’s own copy of it, distinct from other tasks.
Example of TLS in C11
#include <threads.h>
#include <stdio.h>
#include <stdlib.h>
thread_local int counter = 0;
int thread_func(void *arg) {
int id = *(int*)arg;
counter++; // Each thread increments its own copy
printf("Thread %d: counter = %d\n", id, counter);
return 0;
}
int main() {
thrd_t threads[4];
int ids[4] = {1, 2, 3, 4};
for (int i = 0; i < 4; i++) {
thrd_create(&threads[i], thread_func, &ids[i]);
}
for (int i = 0; i < 4; i++) {
thrd_join(threads[i], NULL);
}
printf("Main thread counter: %d\n", counter); // Main's own copy
return 0;
}Although the application is accessing and modifying a global variable, it’s actually different memories being used under the hood. Each thread has it’s own copy to work with.
What is thread_local? In the pre-C23 world it’s a macro, which expands to the _Thread_local keyword, which
is the same as compiler specific __thread in GCC and Clang.
Reverse engineering
We’re going to learn how the TLS works via reverse engineering. We need to understand it, before getting to Implementing it ourselves. Let’s look at the disassembly first, generated by Clang 21.1.0 on https://godbolt.org.
I’ve added some comments here, so everything is nice and easy to read.
Assembly generated from Clang
/* int thread_func(void *arg) */
thread_func:
/* Push new stack frame */
push rbp
mov rbp, rsp
mov qword ptr [rbp - 8], rdi /* store arg on the stack frame */
/* Read the ID value */
/* int id = *(int*)arg; */
mov rax, qword ptr [rbp - 8]
mov eax, dword ptr [rax]
mov dword ptr [rbp - 12], eax
/* counter++; */
mov rax, qword ptr fs:[0] /* ?????????? */
lea rax, [rax + counter@TPOFF]
mov ecx, dword ptr [rax]
add ecx, 1 /* do the ++ */
mov dword ptr [rax], ecx
/* return 0; */
xor eax, eax
pop rbp
ret
/* The rest is irrelevant here... */
counter:
.long 0What is fs:[0] (also written commonly as %fs:0 in GNU syntax)?
We’re going to refer to fs as %fs (GNU syntax), because that’s how I write my assembly, but you can look
up the analogous syntax for you assembler (like nasm or fasm).
x86 segmentation
%fs is an x86 segment register. There are also other segment registers:
-
%cscode segment -
%dsdata segment -
%ssstack segment -
%esextra segment -
%fs,%gsgeneral segments
Real mode (16 bit)
x86_64 (yes, a 64 bit CPU) boots up first in 16 bit mode or the "real mode". In real mode we only have 16 bit registers, so one might think that we can address only up to 64K of memory. Segmentation let’s us use more memory, because it changes the logical addressing scheme. Instead of pointing to a specific byte in memory, we an point to a block of memory and displace from the base of it to get the byte - and thus we can address more than 64K. Early x86 CPUs (like the OG Intel 8086) could address up to 1MB.
This explains the %fs:0 syntax. We have a %fs base and a 0 displacement.
A good explaination can be also found on the OSDev wiki: https://wiki.osdev.org/Segmentation.
Also reading the GDT article will come in handy: https://wiki.osdev.org/Global_Descriptor_Table. From now on
I will assume we’re already working with 64 bit GDT and we’re going to skip the 32 bit mode entirely in this
article.
Long mode (64 bit)
Real mode uses 16 bit addresses as the segment base, so analogously 64 bit segmentation will use 64 bit addresses.
Segment registers are different
Segment registers are not like your typical %rax or %rcx - at least some. You can freely write to %ds,
%ss, %es and that’s it! %cs, %fs, %gs are special in that they cannot be written to manually.
%cs can be reloaded by for example lretq instruction, %fs and %gs require writing to an MSR
(will explain in a bit).
Detour about MSRs
MSR mean Model-Specific Register. Intel basically wanted to add unstable features and didn’t want to clutter up their architecture with experimental slop. Some of the MSRs were useful enough that they made it into future Intel CPUs and stayed with us. Generaly speaking, MSRs control OS-related stuff about the CPU.
MSRs are used with the rdmsr/wrmsr instructions. The scheme is like so:
movl NUMBER_OF_MSR, %ecx
movl VALUE_BITS_LOW, %eax
movl VALUE_BITS_HIGH, %edx
wrmsr
movl NUMBER_OF_MSR, %ecx
rdmsr
/* now %eax contains high bits and %edx low bits. These two shall be concatinated into a 64 bit value */%fs and MSRs
I’ve mentioned previously that the %fs and %gs registers can be written to by writing to an MSR - but which one?
The MSR we care about is called (in the Intel manual) IA32_FS_BASE. To address the confusion early on I’ll say
that some people call it slightly differently, for eg. in the Xen hypervisor code it’s called MSR_FS_BASE. My
kernel takes the definition header from Xen, so that’s why I will use Xen’s naming scheme, but IA32_FS_BASE
would be the official name.
Looking at the file kernel/amd64/msr-index.h we can see a juicy #define:
kernel/amd64/msr-index.h
#define MSR_FS_BASE _AC (0xc0000100, U) /* 64bit FS base */The magic MSR number is 0xc0000100. Here’s how I’m using it:
kernel/amd64/sched1.c
void do_sched (struct proc* proc, spin_lock_t* cpu_lock, spin_lock_ctx_t* ctxcpu) {
spin_lock_ctx_t ctxpr;
spin_lock (&proc->lock, &ctxpr);
thiscpu->tss.rsp0 = proc->pdata.kernel_stack; /* set TSS kernel stack */
thiscpu->syscall_kernel_stack = proc->pdata.kernel_stack; /* set syscall entry stack */
amd64_wrmsr (MSR_FS_BASE, proc->pdata.fs_base); /* switch to proc's fs base */
spin_unlock (&proc->lock, &ctxpr);
spin_unlock (cpu_lock, ctxcpu);
amd64_do_sched ((void*)&proc->pdata.regs, (void*)proc->procgroup->pd.cr3_paddr);
}The MSR helpers are written like so:
kernel/amd64/msr.c
/// Read a model-specific register
uint64_t amd64_rdmsr (uint32_t msr) {
uint32_t low, high;
__asm__ volatile ("rdmsr" : "=a"(low), "=d"(high) : "c"(msr));
return ((uint64_t)high << 32 | (uint64_t)low);
}
/// Write a model-specific register
void amd64_wrmsr (uint32_t msr, uint64_t value) {
uint32_t low = (uint32_t)(value & 0xFFFFFFFF);
uint32_t high = (uint32_t)(value >> 32);
__asm__ volatile ("wrmsr" ::"c"(msr), "a"(low), "d"(high));
}What we do is we swap out base value of %fs for each process and every process has it’s own TLS!
When processes are switched, the new MSR_FS_BASE is written.
So what is %fs:0 again?
We’ve managed to establish what %fs is, but what %fs:0 is?
The authors of System V TLS ABI for x86_64 were quite smart. %fs CANNOT be accessed on it’s own, sort of. We
can’t use it like a regular pointer to the TLS. We can only use segment registers with a displacement.
So when we can’t use %fs, we can use %fs:0! %fs points to the TLS + 8 byte pointer back to itself, so then
%fs:0 can become a pointer to the real TLS memory block.
Also, the TLS variable offsets are negative!
The TLS memory:
Var 1 Var 2 Var 3 Var 4 .... The pointer
+-------------------------------------------------------------------------------+
| | | | | | | | | | <---+
+-------------------------------------------------------------------------------+ |
|
^ |
| |
TLS (fs base) |
|
%fs:0 --------------+If this is too difficult to grasp (don’t worry, I’ve spent days banging by head against a wall mysekf), I’ll show you now the code, which handles the TLS in a bit. Now we’re going to take another detour to discuss how the TLS looks like from the perspective of the ELF file format.
TLS and ELF relationship
I’m not going to go out of my way to explain the ELF format entirely - it’s out of scope for today, but I’ll link a useful article here: https://wiki.osdev.org/ELF. It’s a great read on the basics of the ELF format.
{kind=link}
ELF has the so-called "sections". A section is a piece of data that makes up the final executable. A section can
be .text where your executable code resides or .rodata where your read-only data sits (like string literals).
ELF also has a special TLS section. This may seem confusing, since why would ELF store some sort of TLS, when each task must have it’s own? The TLS section is actually a template/"meta" section. It’s not the actual TLS, but rather a template of how should the TLS be contructed.
For example:
__thread int a = 123;
void my_thread (void) {
printf ("a = %d\n", a);
a = 456;
printf ("a = %d\n", a);
}The first printf will display 123, because the TLS template says that a shall have initial value of 123, but
then the thread is free to modify it’s own version. It just starts out with what is provided by the ELF file.
Linking the user application
An ELF application has to be linked after we’ve compiled all the necessary object files.
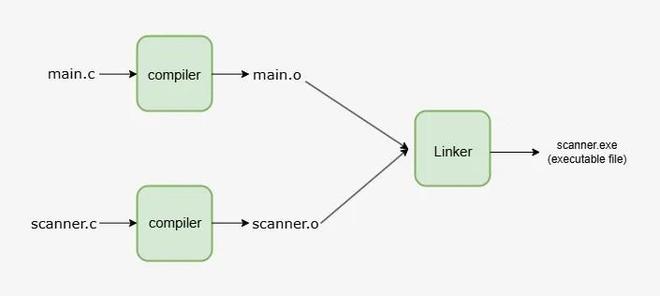
{kind=link}
To get the exact ELF layout we need (remember, we’re making our own OS), we can use a linker script.
OUTPUT_FORMAT(elf64-x86-64)
ENTRY(_start)
PHDRS {
text PT_LOAD;
rodata PT_LOAD;
data PT_LOAD;
bss PT_LOAD;
tls PT_TLS; /* <------ !!!! */
}
SECTIONS {
. = 0x0000500000000000;
/* The executable code instructions */
.text : {
*(.text .text.*)
*(.ltext .ltext.*)
} :text
. = ALIGN(0x1000);
/* Read-only data */
.rodata : {
*(.rodata .rodata.*)
} :rodata
. = ALIGN(0x1000);
/* initialized data */
.data : {
*(.data .data.*)
*(.ldata .ldata.*)
} :data
. = ALIGN(0x1000);
__bss_start = .;
/* uninitialized data */
.bss : {
*(.bss .bss.*)
*(.lbss .lbss.*)
} :bss
__bss_end = .;
. = ALIGN(0x1000);
__tdata_start = .;
/* initialized TLS data */
.tdata : {
*(.tdata .tdata.*)
} :tls /* <------ !!!! */
__tdata_end = .;
__tbss_start = .;
/* uninitialized TLS data */
.tbss : {
*(.tbss .tbss.*)
} :tls /* <------ !!!! */
__tbss_end = .;
__tls_size = __tbss_end - __tdata_start;
/DISCARD/ : {
*(.eh_frame*)
*(.note .note.*)
}
}PT_TLS is the "program header" type - in this case we say that we want this part of the executable to be of
TLS type. This will help our OS' loader distinguish between different parts of the app and how should it act upon
them.
Also note that we mark .tdata and .tbss both as :tls. This just tells the linker to merge those sections
together into a tls section (which we mark as PT_TLS).
Loader
Now let’s take a look inside the ELF loader:
case PT_TLS: {
#if defined(__x86_64__)
if (phdr->p_memsz > 0) {
/* What is the aligment we need to use? */
size_t tls_align = phdr->p_align ? phdr->p_align : sizeof (uintptr_t);
/* Size of the TLS memory block (variables go here) */
size_t tls_size = align_up (phdr->p_memsz, tls_align);
/* Size needed - TLS block size + 8 bytes (64 bits) for back pointer */
size_t tls_total_needed = tls_size + sizeof (uintptr_t);
/* amount of pages to allocate */
size_t blks = div_align_up (tls_total_needed, PAGE_SIZE);
/* Initialize TLS template in the procgroup. This will be copied into individual TLSes */
proc->procgroup->tls.tls_tmpl_pages = blks;
proc->procgroup->tls.tls_tmpl_size = tls_size;
proc->procgroup->tls.tls_tmpl_total_size = tls_total_needed;
/* malloc () and zero out */
proc->procgroup->tls.tls_tmpl = malloc (blks * PAGE_SIZE);
memset (proc->procgroup->tls.tls_tmpl, 0, blks * PAGE_SIZE);
/* copy initialized stuff */
memcpy (proc->procgroup->tls.tls_tmpl, (void*)((uintptr_t)elf + phdr->p_offset),
phdr->p_filesz);
proc_init_tls (proc);
}
#endif
} break;void proc_init_tls (struct proc* proc) {
struct limine_hhdm_response* hhdm = limine_hhdm_request.response;
/* This application doesn't use TLS */
if (proc->procgroup->tls.tls_tmpl == NULL)
return;
size_t tls_size = proc->procgroup->tls.tls_tmpl_size;
size_t pages = proc->procgroup->tls.tls_tmpl_pages;
uintptr_t tls_paddr;
uint32_t flags = MM_PG_USER | MM_PG_PRESENT | MM_PG_RW;
/* allocate a new TLS memory space and map it into the procgroup's address space */
uintptr_t tls_vaddr = procgroup_map (proc->procgroup, 0, pages, flags, &tls_paddr);
uintptr_t k_tls_addr = (uintptr_t)hhdm->offset + tls_paddr;
/* zero and copy the template contents */
memset ((void*)k_tls_addr, 0, pages * PAGE_SIZE);
memcpy ((void*)k_tls_addr, (void*)proc->procgroup->tls.tls_tmpl, tls_size);
/* kernel address and user address + size will point to the tls pointer */
uintptr_t ktcb = k_tls_addr + tls_size;
uintptr_t utcb = tls_vaddr + tls_size;
/* write the pointer value, which makes the TLS point to itself */
*(uintptr_t*)ktcb = utcb;
/* store as fs_base for switching during scheduling */
proc->pdata.fs_base = utcb;
/* save allocation address to later free it when not needed */
proc->pdata.tls_vaddr = tls_vaddr;
}Conclusion
And that’s it! we can use the TLS now in user apps!
#define MUTEX 2000
LOCAL volatile char letter = 'c';
void app_proc1 (void) {
letter = 'a';
for (;;) {
mutex_lock (MUTEX);
for (int i = 0; i < 3; i++)
test (letter);
mutex_unlock (MUTEX);
}
process_quit ();
}
void app_proc2 (void) {
letter = 'b';
for (;;) {
mutex_lock (MUTEX);
for (int i = 0; i < 3; i++)
test (letter);
mutex_unlock (MUTEX);
}
process_quit ();
}
void app_proc3 (void) {
letter = 'c';
for (;;) {
mutex_lock (MUTEX);
for (int i = 0; i < 3; i++)
test (letter);
mutex_unlock (MUTEX);
}
process_quit ();
}
void app_main (void) {
mutex_create (MUTEX);
letter = 'a';
process_spawn (&app_proc1, NULL);
process_spawn (&app_proc2, NULL);
process_spawn (&app_proc3, NULL);
for (;;) {
mutex_lock (MUTEX);
for (int i = 0; i < 3; i++)
test (letter);
mutex_unlock (MUTEX);
}
}My personal thoughts
{kind=link}
This was difficult… Way too difficult to implement. When reading the spec and then trying to make it work, I’ve noticed that all this pointer/size/alignment trickery is just so we can go around the face that x86_64 doesn’t have a built-in architectural mechanism to support such thing as TLS. All you have is a bunch of free registers and it’s up to you to make something out of that. I guess ARM is better in this case, because there’s a single source of authority that produces the CPU and sets the rules to abide by.
Mutexes and process suspension in kernels
30 January 2026
Hello!
In this blog post I would like to share my thoughts and some implementation details about the mutex mechanism in MOP3!
WAIT! MOP 3?
Yes! MOP2 is undergoing a huge rewrite and redesign right now, due to me not being happy with some design choices of the system. This is mostly about writing SMP-first/SMP-friendly code. The rewrite turned out to be so big that it was just easier to start a new project, while reusing big portions of older MOP2 code - and thus MOP3 was born. Excpect more interesting updates in the future!
New GIT repository: https://git.kamkow1lair.pl/kamkow1/MOP3
Multitasking is deliquete
Preface
This portion of the article will explain critical sections and why they’re so fragile. If you’re an advanced reader, you can easily skip it.
Writing multitasked/paralell code is notoriously difficult and can lead to bazzire, awful and undeterministic
bugs. One should keep in mind that multitasked code is not something debuggable with normal developer tools
like gdb or lldb or some other crash analyzers and code inspectors. Rather than that, such code should be
proven to be safe/correct, either by just reading the code or writing formal proofs.
Formal proofs can be written using the Promela scripting language: https://spinroot.com/spin/whatispin.html
The problem
Imagine this problem in a multitasked application:
A disaster happens here
struct my_list_node {
struct my_list_node* next, *prev;
int value;
};
/* These are complex operations on multiple pointers */
#define LIST_ADD(list, x) ...
#define LIST_REMOVE(list, x) ...
struct my_list_node* my_list = ...;
void thread_A (void) {
struct my_list_node* new_node = malloc (sizeof (*new_node));
new_node->value = 67;
LIST_ADD (my_list, new_node);
}
void thread_B (void) {
LIST_REMOVE (my_list, my_list); /* remove head */
}The issue here is that, while thread_A is adding a new node, thread_B can try to remove it. This will
lead to pointer corruption, since LIST_REMOVE and LIST_ADD will try to re-link list’s nodes at the same
time.
Such fragile sections of code are called "critical sections", meaning that one has to be VERY careful when tasks enter it. So where are they in the code?
void thread_A (void) {
/* NOT CRITICAL - new_node is not yet visible to other tasks */
struct my_list_node* new_node = malloc (sizeof (*new_node));
new_node->value = 67;
/* CRITICAL */
LIST_ADD (my_list, new_node);
}
void thread_B (void) {
/* CRITICAL */
LIST_REMOVE (my_list, my_list); /* remove head */
}So how do we solve this?
This specific problem can be easily solved by, what’s called "Mutual Exclusion" or "MutEx" for short.
Why "mutual exclusion"? As you can see, to modify the list, a task needs exclusive access to it, ie. nobody else can be using the list at the same time. Kind of like a bathroom - imagine someone happily walks in while you’re sitting on a toilet and tries to fit right beside you.
A poor man’s mutex and atomicity
Let’s park it here and move to a slightly different, but related topic - atomicity. What is it?
To be atomic is to be indivisible. An atomic read or a write is an operation that can’t be split up and has to be completed from start to finish without being interrupted.
While atomic operations are mutually exclusive, they work on a level of individual reads/writes of integers of various sizes. One can atomically read/write a byte or an uint64_t. This of course won’t solve our problem, because we’re operating on many integers (here pointers) simultaneously - struct my_list_node’s prev and next pointers - but despite that, we can leverage atomicity to implement higher level synchronization constructs.
BTW, documentation on atomic operations in C can be found here: https://en.cppreference.com/w/c/atomic.html. The functions/macros are implemented internally by the compiler, for eg. GCC atomics: https://gcc.gnu.org/onlinedocs/gcc/_005f_005fatomic-Builtins.html. They have to be implemented internally, because they’re very platform dependant and each architecture may handle atomicity slightly differently, although the same rules apply everwhere.
Now that we’ve discussed C atomics, let’s implement the poor man’s mutex!
What needs to be done? We’ve established that only one task can be using the list at a time. We’d probably want some sort of a flag to know if it’s our turn to use the list. If the flag is set, it means that someone is currently using the list and thus we have to wait. If clear, we’re good to go.
Obviously, the flag has to be atomic by itself. Otherwise one task could read the flag, while it’s being updated, leading to a thread entering the critical section, when it’s not it’s turn.
#include <stdatomic.h>
#define SPIN_LOCK_INIT ATOMIC_FLAG_INIT
typedef atomic_flag spin_lock_t;
void spin_lock (spin_lock_t* sl) {
while (atomic_flag_test_and_set_explicit (sl, memory_order_acquire))
;
}
void spin_unlock (spin_lock_t* sl) {
atomic_flag_clear_explicit (sl, memory_order_release);
}
// List same as before...
// the lock
spin_lock_t the_lock = SPIN_LOCK_INIT;
void thread_A (void) {
struct my_list_node* new_node = malloc (sizeof (*new_node));
new_node->value = 67;
spin_lock (&the_lock);
LIST_ADD (my_list, new_node);
spin_unlock (&the_lock);
}
void thread_B (void) {
spin_lock (&the_lock);
LIST_REMOVE (my_list, my_list); /* remove head */
spin_unlock (&the_lock);
}As you can see, if a task tries to modify the list, it must first check whether it can do so. If not, wait until such operation is possible. Pretty easy, eh?
There are some big and small improvements to be made, so let’s pick up a spying glass and analyze!
Small inefficiency
When we fail to lock the spin lock, we’re stuck in a spin-loop. This is really bad for performance, because we’re just eating up CPU cycles for nothing. A better spin lock would "relax the CPU", ie. tell the processor that it’s stuck in a spin-loop and make it consume less power or switch hardware tasks.
On x86 we have a pause instruction: https://www.felixcloutier.com/x86/pause.
ARM has a yield instruction: https://developer.arm.com/documentation/dui0802/b/A32-and-T32-Instructions/SEV—SEVL—WFE—WFI—and-YIELD.
Big inefficiency
Despite the pause or yield instructions and such, we still have an underlying flaw in our spin lock.
The issue is that we’re just spinning when we fail to acquire the lock, when we could hand over control
to another task - we can’t have access ourselves, so let someone else take the precious CPU time and get
a little bit of work done.
Despite this "inefficiency", spin locks are the most primitive-yet-useful way of locking. This example shows a simple solution to a simple problem, but in the real-world one would use spin locks to implement higher level/smarter ways of providing task synchronization.
The better mutex and it’s building blocks
So if spinning in place is "bad" for performance, what do we do then? Here come the "suspension queues".
Scheduler states
If we fail to acquire a mutex, it means that we’re stuck waiting for it. If we’re stuck, we shouldn’t be scheduled, ie. given CPU time (there’s no work to be done). To denote this, we have to introduce another process state:
/* process states */
#define PROC_READY 0
#define PROC_DEAD 1
#define PROC_SUSPENDED 2 /* NEW */This new state describes a new situation in our scheduler - a process IS alive, but CANNOT be scheduled. Before we only had alive (schedulable) processes and dead (unschedulable) processes.
Now our scheduler won’t pick up suspended processes:
// ...
static struct proc* proc_find_sched (struct cpu* cpu) {
if (!cpu->proc_run_q)
return NULL;
struct list_node_link *current, *start;
if (cpu->proc_current)
current = cpu->proc_current->cpu_run_q_link.next;
else
current = cpu->proc_run_q;
if (!current)
current = cpu->proc_run_q;
start = current;
do {
struct proc* proc = list_entry (current, struct proc, cpu_run_q_link);
if (atomic_load (&proc->state) == PROC_READY)
return proc;
current = current->next ? current->next : cpu->proc_run_q;
} while (current != start);
return NULL;
}
// ...
void proc_sched (void) {
spin_lock_ctx_t ctxcpu;
int s_cycles = atomic_fetch_add (&sched_cycles, 1);
if (s_cycles % SCHED_REAP_FREQ == 0)
proc_reap ();
struct proc* next = NULL;
struct cpu* cpu = thiscpu;
spin_lock (&cpu->lock, &ctxcpu);
next = proc_find_sched (cpu);
if (next) {
cpu->proc_current = next;
do_sched (next, &cpu->lock, &ctxcpu);
} else {
cpu->proc_current = NULL;
spin_unlock (&cpu->lock, &ctxcpu);
spin ();
}
}Suspension queues
A suspension queue is a little tricky - it’s not just a list of suspended processes. We need to establish a many:many relationship (kinda like in databases). A process can be a member of many suspension queues (image a process, which waits on many mutexes) and a single suspension queue has many member processes. In order to achieve that, we can do some pointer trickery!
struct proc {
int pid;
struct rb_node_link proc_tree_link;
struct rb_node_link procgroup_memb_tree_link;
struct list_node_link cpu_run_q_link;
struct list_node_link reap_link;
struct list_node_link* sq_entries; /* list of intermediate structs */
struct procgroup* procgroup;
struct proc_platformdata pdata;
uint32_t flags;
spin_lock_t lock;
struct cpu* cpu;
atomic_int state;
uintptr_t uvaddr_argument;
};
struct proc_suspension_q {
struct list_node_link* proc_list; /* list of processes via proc_sq_entry */
spin_lock_t lock;
};
/* the intermediate struct */
struct proc_sq_entry {
struct list_node_link sq_link; /* list link */
struct list_node_link proc_link; /* list link */
struct proc* proc; /* pointer back to the process */
struct proc_suspension_q* sq; /* pointer back to the suspension queue */
};Now we can talk about the suspend/resume algorithms.
bool proc_sq_suspend (struct proc* proc, struct proc_suspension_q* sq, spin_lock_t* resource_lock,
spin_lock_ctx_t* ctxrl) {
spin_lock_ctx_t ctxpr, ctxcpu, ctxsq;
struct cpu* cpu = proc->cpu;
/* allocate intermediate struct */
struct proc_sq_entry* sq_entry = malloc (sizeof (*sq_entry));
if (!sq_entry) {
spin_unlock (resource_lock, ctxrl);
return PROC_NO_RESCHEDULE;
}
/* set links on both ends */
sq_entry->proc = proc;
sq_entry->sq = sq;
/* lock with compliance to the lock hierachy */
spin_lock (&cpu->lock, &ctxcpu);
spin_lock (&proc->lock, &ctxpr);
spin_lock (&sq->lock, &ctxsq);
spin_unlock (resource_lock, ctxrl);
/* transition the state to PROC_SUSPENDED */
atomic_store (&proc->state, PROC_SUSPENDED);
/* append to sq's list */
list_append (sq->proc_list, &sq_entry->sq_link);
/* append to proc's list */
list_append (proc->sq_entries, &sq_entry->proc_link);
/* remove from CPU's run list and decrement CPU load counter */
list_remove (cpu->proc_run_q, &proc->cpu_run_q_link);
atomic_fetch_sub (&cpu->proc_run_q_count, 1);
if (cpu->proc_current == proc)
cpu->proc_current = NULL;
/* a process is now unschedulable, so it doesn't need a CPU */
proc->cpu = NULL;
/* release the locks */
spin_unlock (&sq->lock, &ctxsq);
spin_unlock (&proc->lock, &ctxpr);
spin_unlock (&cpu->lock, &ctxcpu);
return PROC_NEED_RESCHEDULE;
}
bool proc_sq_resume (struct proc* proc, struct proc_sq_entry* sq_entry) {
spin_lock_ctx_t ctxsq, ctxpr, ctxcpu;
struct cpu* cpu = cpu_find_lightest (); /* find the least-loaded CPU */
struct proc_suspension_q* sq = sq_entry->sq;
/* acquire necessary locks */
spin_lock (&cpu->lock, &ctxcpu);
spin_lock (&proc->lock, &ctxpr);
spin_lock (&sq->lock, &ctxsq);
/* remove from sq's list */
list_remove (sq->proc_list, &sq_entry->sq_link);
/* remove from proc's list */
list_remove (proc->sq_entries, &sq_entry->proc_link);
/* Give the CPU to the process */
proc->cpu = cpu;
/*
* update process state to PROC_READY, but only if it's not waiting inside
* another suspension queue.
*/
if (proc->sq_entries == NULL)
atomic_store (&proc->state, PROC_READY);
/* attach to CPU's run list and increment load counter */
list_append (cpu->proc_run_q, &proc->cpu_run_q_link);
atomic_fetch_add (&cpu->proc_run_q_count, 1);
/* unlock */
spin_unlock (&sq->lock, &ctxsq);
spin_unlock (&proc->lock, &ctxpr);
spin_unlock (&cpu->lock, &ctxcpu);
/* intermediate struct is no longer needed, so free it */
free (sq_entry);
return PROC_NEED_RESCHEDULE;
}As you can see, this algorithm is quite simple actually. It’s just a matter of safely appending/removing links to specific lists.
The mutex itself
The mutex is quite simple too.
struct proc_mutex {
struct proc_resource* resource; /* pointer back to the resource */
bool locked; /* taken or free */
struct proc_suspension_q suspension_q; /* suspension queue of waiting processes */
struct proc* owner; /* current owner of the mutex / process, which can enter the critical section */
};And now the lock and unlock algorithms.
bool proc_mutex_lock (struct proc* proc, struct proc_mutex* mutex) {
spin_lock_ctx_t ctxmt;
spin_lock (&mutex->resource->lock, &ctxmt);
/* we can enter if: the mutex is NOT locked or we're already the owner of the mutex */
if (!mutex->locked || mutex->owner == proc) {
mutex->locked = true;
mutex->owner = proc;
spin_unlock (&mutex->resource->lock, &ctxmt);
return PROC_NO_RESCHEDULE;
}
/* we failed to become an owner, thus we have to free up the CPU and suspend ourselves */
return proc_sq_suspend (proc, &mutex->suspension_q, &mutex->resource->lock, &ctxmt);
}
bool proc_mutex_unlock (struct proc* proc, struct proc_mutex* mutex) {
spin_lock_ctx_t ctxmt, ctxsq;
spin_lock (&mutex->resource->lock, &ctxmt);
/*
* we can't unlock a mutex, which we don't already own,
* otherwise we could just steal someone else's mutex.
*/
if (mutex->owner != proc) {
spin_unlock (&mutex->resource->lock, &ctxmt);
return PROC_NO_RESCHEDULE;
}
spin_lock (&mutex->suspension_q.lock, &ctxsq);
struct list_node_link* node = mutex->suspension_q.proc_list;
/*
* This is a little tricky. What we're doing here is "direct handoff" - we basically
* transfer ownership, while keeping the mutex locked, instead of just unlocking and
* resuming everyone.
*/
if (node) {
struct proc_sq_entry* sq_entry = list_entry (node, struct proc_sq_entry, sq_link);
struct proc* resumed_proc = sq_entry->proc;
/* transfer ownership */
mutex->owner = resumed_proc;
mutex->locked = true;
spin_unlock (&mutex->suspension_q.lock, &ctxsq);
spin_unlock (&mutex->resource->lock, &ctxmt);
/* resume new owner - it can enter the critical section now */
return proc_sq_resume (resumed_proc, sq_entry);
}
/* no possible future owner found, so we just unlock */
mutex->locked = false;
mutex->owner = NULL;
spin_unlock (&mutex->suspension_q.lock, &ctxsq);
spin_unlock (&mutex->resource->lock, &ctxmt);
return PROC_NEED_RESCHEDULE;
}Direct handoff and "The Thundering Herd"

{kind=link}
Why the direct handoff? Why not just unlock the mutex?
The thundering herd problem is very common in multitasking and synchronization.
We free the mutex, wake up all waiters and now anyone can take it. The issue here is that ONLY ONE task will eventually get to acquire the mutex and enter the critical section. If only one gets to take the mutex, why bother waking up everyone? The solution here would be to pass down the ownership to the first encountered waiter and then the next one and so on. Also waking everyone would be cause a performance penatly, because we’re wasting CPU cycles just to be told not to execute any further.
two birds, one stone
Via direct handoff, we’ve also just eliminated a fairness problem.
What does it mean for a mutex to be "fair"?
Fairness in synchronization means that each task at some point will get a chance to work in the critical section.
Fairness example problem:
#include <stdatomic.h>
#define SPIN_LOCK_INIT ATOMIC_FLAG_INIT
typedef atomic_flag spin_lock_t;
void spin_lock (spin_lock_t* sl) {
while (atomic_flag_test_and_set_explicit (sl, memory_order_acquire))
__asm__ volatile ("pause");
}
void spin_unlock (spin_lock_t* sl) {
atomic_flag_clear_explicit (sl, memory_order_release);
}
// the lock
spin_lock_t the_lock = SPIN_LOCK_INIT;
void thread_A (void) {
for (;;) {
spin_lock (&the_lock);
{
/* critical section goes here */
}
spin_unlock (&the_lock);
}
}
void thread_B (void) {
for (;;) {
spin_lock (&the_lock);
{
/* critical section goes here */
}
spin_unlock (&the_lock);
}
}Let’s take thread_B for example. thread_B locks, does it’s thing and unlocks. Because it’s in an infinite
loop, there’s a chance that it may re-lock too quickly, before thread_A gets the chance. This causes a
fairness issue, because thread_A is getting starved - it can’t enter the critical section, even though it
plays by the rules, synchronizing properly with thread_B via a spinlock. On real CPUs (ie. real hardware
or QEMU with -enable-kvm), there will always be some tiny delays/"clog ups" that mitigate this problem,
but theoretically it is possible that a task can starve.
Our algorithm solves this by always selecting the next thread to own the mutex, so we never get the issue that when we unlock, the new owner is selected randomly - the first one to get it, owns it. This makes the approach more deterministic/predictible.
Final result
This is the final result of our work!
#include <limits.h>
#include <proc/local.h>
#include <proc/proc.h>
#include <stddef.h>
#include <stdint.h>
#include <string/string.h>
/* ID of the mutex resource */
#define MUTEX 2000
/* TLS (thread-local storage) support was added recently ;)! */
LOCAL volatile char letter = 'x';
void app_proc (void) {
char arg_letter = (char)(uintptr_t)argument_ptr ();
letter = arg_letter;
for (;;) {
/* enter the critical section, print the _letter_ 3 times and leave */
mutex_lock (MUTEX);
for (int i = 0; i < 3; i++)
test (letter);
mutex_unlock (MUTEX);
}
process_quit ();
}
void app_main (void) {
mutex_create (MUTEX);
letter = 'a';
process_spawn (&app_proc, (void*)'b');
process_spawn (&app_proc, (void*)'c');
process_spawn (&app_proc, (void*)'d');
for (;;) {
mutex_lock (MUTEX);
for (int i = 0; i < 3; i++)
test (letter);
mutex_unlock (MUTEX);
}
}FAT filesystem integration into MOP2
19 November 2025
Hello, World!
I would like to present to you FAT filesystem integration into the MOP2 operating system! This was
possible thanks to fat_io_lib library by UltraEmbedded, because there’s no way I’m writing an
entire FAT driver from scratch ;).
Source for fat_io_lib: https://github.com/ultraembedded/fat_io_lib
Needed changes and a "contextual" system
Integrating fat_io_lib wasn’t so straightforward as I thought it would be. To understand the problem we need to first understand the current design of MOP2’s VFS.
MOP2’s VFS explained
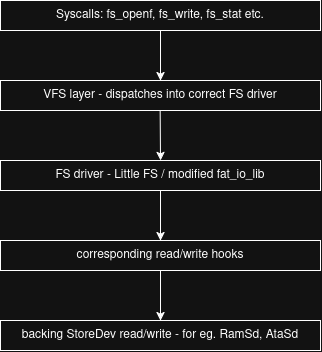
The VFS (ie. Virtual File System) is a Windows/DOS-style labeled VFS. Mountpoints are identified by
a label, like for eg. sys:/boot/mop2 or base:/scripts/mount.tb, which kinda looks like
C:\Path\To\File in Windows. I’ve chosen this style of VFS over the UNIX kind, because it makes more
sense to me personally. A mountpoint label can point to a physical device, a virtual device (ramsd)
or a subdevice/partition device. In the UNIX world on the other hand, we have a hierarchical VFS, so
paths look like /, /proc, /dev, etc. This is a little confusing to reason about, because you’d
think that if / is mounted let’s say on a drive sda0, then /home would be a home directory
within the root of that device. This is not always the case. / can be placed on sda0, but /home
can be placed on sdb0, so now something that looks like a subdirectory, is now a pointer to an
entirely different media. Kinda confusing, eh?
The problem
So now that we know how MOP2’s VFS works, let’s get into low-level implementation details. To handle mountpoints we use a basic hashtable. We just map the label to the proper underlying file system driver like so:
base -> Little FS
uhome -> Little FS
sys -> FAT16Through this table, we can see that we have two mountpoints (base and uhome), which both use Little FS, but are placed on different media entirely. Base is located on a ramsd, which is entirely virtual and uhome is a partition on a physical drive.
To manage such setup, we need to have separate filesystem library contexts for each mountpoint.
A context here means an object, which stores info like block size, media read/write/sync hooks,
media capacity and so on. Luckly, with Little FS we could do this out of the box, because it blesses
us with lfs_t - an instance object. We can then create this object for each Little FS mountpoint.
Internals of the VFS mountpoint structure
typedef struct VfsMountPoint {
int _hshtbstate;
char label[VFS_MOUNTPOINT_LABEL_MAX];
int32_t fstype;
StoreDev *backingsd;
VfsObj *(*open)(struct VfsMountPoint *vmp, const char *path, uint32_t flags);
int32_t (*cleanup)(struct VfsMountPoint *vmp);
int32_t (*stat)(struct VfsMountPoint *vmp, const char *path, FsStat *statbuf);
int32_t (*fetchdirent)(struct VfsMountPoint *vmp, const char *path, FsDirent *direntbuf, size_t idx);
int32_t (*mkdir)(struct VfsMountPoint *vmp, const char *path);
int32_t (*delete)(struct VfsMountPoint *vmp, const char *path);
// HERE: instance objects for the underlying filesystem driver library.
union {
LittleFs littlefs;
FatFs fatfs;
} fs;
SpinLock spinlock;
} VfsMountPoint;
typedef struct {
SpinLock spinlock;
VfsMountPoint mountpoints[VFS_MOUNTPOINTS_MAX];
} VfsTable;
// ...Little FS init code
int32_t vfs_init_littlefs(VfsMountPoint *mp, bool format) {
// Configure Little FS
struct lfs_config *cfg = dlmalloc(sizeof(*cfg));
memset(cfg, 0, sizeof(*cfg));
cfg->context = mp;
cfg->read = &portlfs_read; // Our read/write hooks
cfg->prog = &portlfs_prog;
cfg->erase = &portlfs_erase;
cfg->sync = &portlfs_sync;
cfg->block_size = LITTLEFS_BLOCK_SIZE;
cfg->block_count = mp->backingsd->capacity(mp->backingsd) / LITTLEFS_BLOCK_SIZE;
// left out...
int err = lfs_mount(&mp->fs.littlefs.instance, cfg);
if (err < 0) {
ERR("vfs", "Little FS mount failed %d\n", err);
return E_MOUNTERR;
}
// VFS hooks
mp->cleanup = &littlefs_cleanup;
mp->open = &littlefs_open;
mp->stat = &littlefs_stat;
mp->fetchdirent = &littlefs_fetchdirent;
mp->mkdir = &littlefs_mkdir;
mp->delete = &littlefs_delete;
return E_OK;
}So where is the problem? It’s in the fat_io_lib library. You see, the creators of Little FS thought this out pretty well and designed their library in such manner that we can do cool stuff like this. The creators of fat_io_lib on the other hand… yeah. Here are the bits of internals of fat_io_lib:
//-----------------------------------------------------------------------------
// Locals
//-----------------------------------------------------------------------------
static FL_FILE _files[FATFS_MAX_OPEN_FILES];
static int _filelib_init = 0;
static int _filelib_valid = 0;
static struct fatfs _fs;
static struct fat_list _open_file_list;
static struct fat_list _free_file_list;There’s no concept of a "context" - everything is thrown into a bunch of global variables. To clarify: THIS IS NOT BAD! This is good if you need a FAT library for let’s say a microcontroller, or some other embedded device. Less code/stuff == less memory usage and so on.
When I was searching online for a FAT library, I wanted something like Little FS, but to my suprise there are no libraries for FAT designed like this? Unless it’s a homebrew OsDev project, of course. I’ve even went on reddit to ask and got nothing, but cricket noises ;(.
I’ve decided to modify fat_io_lib to suit my needs. I mean, most of the code is already written for me anyway, so I’m good.
The refactoring was quite easy to my suprise! The state of the library is global, but it’s all nicely placed in one spot, so we can then move it out into a struct:
struct fat_ctx {
FL_FILE _files[FATFS_MAX_OPEN_FILES];
int _filelib_init;
int _filelib_valid;
struct fatfs _fs;
struct fat_list _open_file_list;
struct fat_list _free_file_list;
void *extra; // we need this to store a ref to the mountpoint to access storage device hooks
};// This is what our VfsMountPoint struct from earlier was referencing, BTW.
typedef struct {
struct fat_ctx instance;
} FatFs;I’ve then gone on a compiler error hunt for about 2 hours! All I had to do is change references for
eg. from _fs.some_field into ctx→_fs.some_field. It was all pretty much brainless work - just
compile the code, read the error line number, edit the variable reference, repeat.
Why do I even need FAT in MOP2?
I need it, because Limine (the bootloader) uses FAT16/32 (depending on what the user picks) to store the kernel image, resource files and the bootloader binary itself. It’d be nice to be able to view all of these files and manage them, to maybe in the future for eg. update the kernel image from the system itself (self-hosting, hello?).
Fruits of labour
Here are some screenshots ;).
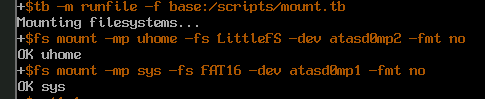
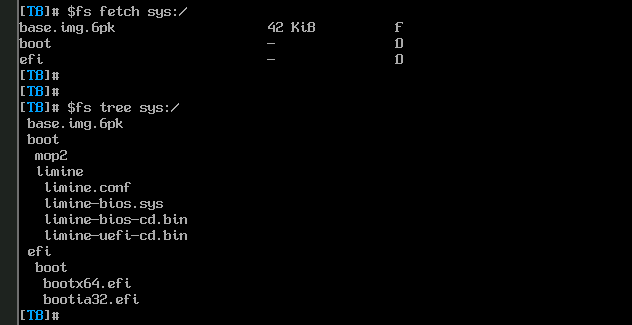
MBus - in-kernel messaging system
12 November 2025
In this article I would like to present to you MBus - a kernel-space messaging IPC mechanism for
the MOP2 operating system.
One-to-many messaging
MBus is a one-to-many messaging system. This means that there’s one sender/publisher and many readers/subscribers. Think of a YouTube channel - a person posts a video and their subscribers get a push notification that there’s content to consume.
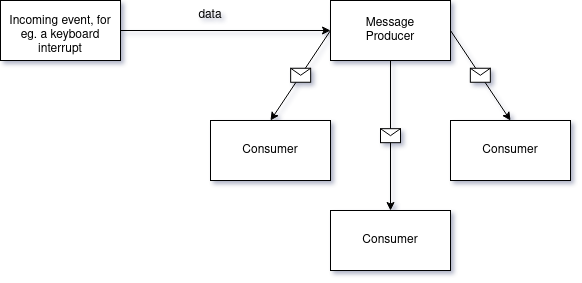
User-space API
This is the user-space API for MBus. The application can create a message bus for objmax
messages of objsize. Message buses are indentified via a global string ID, for eg. the PS/2
keyboard driver uses ID "ps2kb".
ipc_mbusattch and ipc_mbusdttch are used for attaching/detattching a consumer to/from the
message bus.
int32_t ipc_mbusmake(char *name, size_t objsize, size_t objmax);
int32_t ipc_mbusdelete(char *name);
int32_t ipc_mbuspublish(char *name, const uint8_t *const buffer);
int32_t ipc_mbusconsume(char *name, uint8_t *const buffer);
int32_t ipc_mbusattch(char *name);
int32_t ipc_mbusdttch(char *name);Usage
The usage of MBus can be found for eg. inside of TB - the MOP2’s shell:
Initalizing interactive shell mode
if (CONFIG.mode == MODE_INTERACTIVE) {
ipc_mbusattch("ps2kb");
do_mode_interactive();
// ...Reading key presses
// ...
int32_t read = ipc_mbusconsume("ps2kb", &b);
if (read > 0) {
switch (b) {
case C('C'):
case 0xE9:
uprintf("\n");
goto begin;
break;
case C('L'):
uprintf(ANSIQ_CUR_SET(0, 0));
uprintf(ANSIQ_SCR_CLR_ALL);
goto begin;
break;
}
// ...Previously reading the keyboard was done in a quite ugly manner via specialized functions of the
ps2kbdev device object (DEV_PS2KBDEV_ATTCHCONS and DEV_PS2KBDEV_READCH). It was a one big
hack, but the MBus API has turned out quite nicely ;).
With the new MBus API, the PS/2 keyboard driver becomes way cleaner than before (you can dig through the commit history…).
Kernel-side code for the PS/2 keyboard driver
// ...
IpcMBus *PS2KB_MBUS;
void ps2kbdev_intr(void) {
int32_t c = ps2kb_intr();
if (c >= 0) {
uint8_t b = c;
ipc_mbuspublish("ps2kb", &b);
}
}
void ps2kbdev_init(void) {
intr_attchhandler(&ps2kbdev_intr, INTR_IRQBASE+1);
Dev *ps2kbdev;
HSHTB_ALLOC(DEVTABLE.devs, ident, "ps2kbdev", ps2kbdev);
spinlock_init(&ps2kbdev->spinlock);
PS2KB_MBUS = ipc_mbusmake("ps2kb", 1, 0x100);
}The messaging logic is ~20 lines of code now.
The tricky part
The trickiest part to figure out while implementing MBus was to implement
cleaning up dangling/dead consumers. In the current model, a message bus
doesn’t really know if a consumer has died without explicitly detattching
itself from the bus. This is solved by going through each message bus and
it’s corresponding consumers and deleting the ones that aren’t in the list
of currently running processes. This operation is ran every cycle of the
scheduler - you could say it’s a form of garbage collection. All of this
is implemented inside ipc_mbustick:
void ipc_mbustick(void) {
spinlock_acquire(&IPC_MBUSES.spinlock);
// Go through all message buses
for (size_t i = 0; i < LEN(IPC_MBUSES.mbuses); i++) {
IpcMBus *mbus = &IPC_MBUSES.mbuses[i];
// Skip unused slots
if (mbus->_hshtbstate != HSHTB_TAKEN) {
continue;
}
IpcMBusCons *cons, *constmp;
spinlock_acquire(&mbus->spinlock);
// Go through every consumer of this message bus
LL_FOREACH_SAFE(mbus->consumers, cons, constmp) {
spinlock_acquire(&PROCS.spinlock);
Proc *proc = NULL;
LL_FINDPROP(PROCS.procs, proc, pid, cons->pid);
spinlock_release(&PROCS.spinlock);
// If not on the list of processes, purge!
if (proc == NULL) {
LL_REMOVE(mbus->consumers, cons);
dlfree(cons->rbuf.buffer);
dlfree(cons);
}
}
spinlock_release(&mbus->spinlock);
}
spinlock_release(&IPC_MBUSES.spinlock);
}As you can see it’s a quite heavy operation and thus not ideal - but still way ahead of what we had before. I guess the next step would be to figure out a way to optimize this further, although the system doesn’t seem to take a noticable hit in performance (maybe do some benchmarks in the future?).
TB shell scripting for MOP2
08 November 2025
This post is about TB (ToolBox) - the shell interpreter for MOP2 operating system.
Invoking applications
Applications are invoked by providing an absolute path to the binary executable and the list of
arguments. In MOP2 paths must be formatted as MOUNTPOINT:/path/to/my/file. All paths are absolute
and MOP2 doesn’t support relative paths (there’s no concept of a CWD or current working directory).
Example of listing currently running processes
base:/bin/pctl lsTyping out the entire path might get tiresome. Imagine typing MOUNTPOINT:/path/to/app arg more args
every time you want to call an app. This is what TB aliases/macros are for. They make the user type
less ;).
Example of calling an application via an alias
$pctl lsNow that’s way better!
Creating new aliases
To create an alias we can type
mkalias pctl base:/bin/pctlAnd then we can use our $pctl!
But there’s another issue - we have to write aliases for every application, which isn’t better than
us typing out the entire path. Luckliy, there’s a solution for this. TB has two useful functions
that can help us solve this - eachfile and mkaliasbn.
eachfile takes a directory, an ignore list and a command, which is run for every entry in the said
directory. We can also access the current directory entry via special symbol called &EF-ELEM.
In base/scripts/rc.tb we can see the full example in action.
eachfile !.gitkeep base:/bin \
mkaliasbn &EF-ELEMThis script means: for each file in base:/bin (excluding .gitkeep), call mkaliasbn for the current
entry. mkaliasbn then takes the base name of a path, which is expanded by &EF-ELEM and creates
an alias. mkaliasbn just simply does mkalias <app> MP:/path/<app>.
Logging
In the UNIX shell there’s one very useful statement - set -x. set -x tells the shell to print out
executed commands. It’s useful for script debugging or in general to know what the script does (or
if it’s doing anything / not stuck). This is one thing that I hate about Windows - it shows up a
stupid dotted spinner and doesn’t tell you what it’s doing and you start wondering. Is it stuck?
Is it waiting for a drive/network/other I/O? Is it bugged? Can I turn of my PC? Will it break if I
do? The user SHOULD NOT have these kinds of questions. That’s why I believe that set -x is very
important.
I wanted to have something similar in TB, so I’ve added a setlogcmds function. It takes yes or
no as an argument to enable/disable logging. It can be invoked like so:
setlogcmds yesNow the user will see printed statements, for eg. during the system start up:
this is an init script!
+$tb -m runfile -f base:/scripts/mount.tb
Mounting filesystems...
+$fs mount -mp uhome -fs LittleFS -dev atasd-ch0-M-part2 -fmt no
OK uhomeString stack and subshells
In UNIX shell, it’s common to get the output of an application, store it into a variable and then pass that variable around to other apps. For eg:
# Use of a subshell
MYVAR=$(cat file.txt)
echo $MYVAR | myapp # or something...In TB, I’ve decided to go with a stack, since I find it easier to implement than a variable hashmap. A stack can be implemented using any dynamic list BTW.
The stack in TB is manipulated via stackpush and stackpop functions. We can stackpush a string
using stackpush <my string> and then stackpop it to remove it. We can also access the top of
the stack via $stack. It’s a special magic alias, which expands to the string that is at the top.
An example of stack usage would be:
stackpush 'hello world string!'
print $stack
stackpopThe do function
The do function does what a subshell does in UNIX shell. We can do a command an then have it’s
output placed at the top of the stack. An example of this would be:
do print 'hello world from subshell'
print $stack
stackpopIt’s a simpler, more primitive mechanism than the UNIX subshells, but it gets the job done ;).
Intro to MOP2 programming
14 October 2025
This is an introductory post into MOP2 (my-os-project2) user application programming.
All source code (kernel, userspace and other files) are available at https://git.kamkow1lair.pl/kamkow1/my-os-project2.
Let’s start by doing the most basic thing ever: quitting an application.
AMD64 assembly
Hello program in AMD64 assembly
.section .text
.global _start
_start: // our application's entry point
movq $17, %rax // select proc_kill() syscall
movq $-1, %rdi // -1 means "self", so we don't need to call proc_getpid()
int $0x80 // perform the syscall
// We are dead!!As you can see, even though we’re on AMD64, we use int $0x80 to perform a syscall.
The technically correct and better way would be to implement support for syscall/sysret, but int $0x80 is
just easier to get going and requires way less setup. Maybe in the future the ABI will move towards
syscall/sysret.
int $0x80 is not ideal, because it’s a software interrupt and these come with a lot of interrupt overhead.
Intel had tried to solve this before with sysenter/sysexit, but they’ve fallen out of fasion due to complexity.
For purposes of a silly hobby OS project, int $0x80 is completely fine. We don’t need to have world’s best
performance (yet ;) ).
"Hello world" and the debugprint() syscall
Now that we have our first application, which can quit at a blazingly fast speed, let’s try to print something. For now, we’re not going to discuss IPC and pipes, because that’s a little complex.
The debugprint() syscall came about as the first syscall ever (it even has an ID of 1) and it was used for
printing way before pipes were added into the kernel. It’s still useful for debugging purposes, when we want to
literally just print a string and not go through the entire pipeline of printf-style formatting and only then
writing something to a pipe.
Usage of
debugprint() in AMD64 assembly.section .data
STRING:
.string "Hello world!!!"
.section .text
.global _start
_start:
movq $1, %rax // select debugprint()
lea STRING(%rip), %rdi // load STRING
int $0x80
// quit
movq $17, %rax
movq $-1, %rdi
int $0x80Why are we using lea to load stuff? Why not movq? Because we can’t…
We can’t just movq, because the kernel doesn’t support relocatable code - everything is loaded at a fixed
address in a process' address space. Because of this, we have to address everything relatively to %rip
(the instruction pointer). We’re essentially writing position independent code (PIC) by hand. This is what
the -fPIC GCC flag does, BTW.
Getting into C and some bits of ulib
Now that we’ve gone overm how to write some (very) basic programs in assembly, let’s try to untangle, how we get
into C code and understand some portions of ulib - the userspace programming library.
This code snippet should be understandable by now: ._start.S
.extern _premain
.global _start
_start:
call _premainHere _premain() is a C startup function that gets executed before running main(). _premain() is also
responsible for quitting the application.
_premain.c
// Headers skipped.
extern void main(void);
extern uint8_t _bss_start[];
extern uint8_t _bss_end[];
void clearbss(void) {
uint8_t *p = _bss_start;
while (p < _bss_end) {
*p++ = 0;
}
}
#define MAX_ARGS 25
static char *_args[MAX_ARGS];
size_t _argslen;
char **args(void) {
return (char **)_args;
}
size_t argslen(void) {
return _argslen;
}
// ulib initialization goes here
void _premain(void) {
clearbss();
for (size_t i = 0; i < ARRLEN(_args); i++) {
_args[i] = umalloc(PROC_ARG_MAX);
}
proc_argv(-1, &_argslen, _args, MAX_ARGS);
main();
proc_kill(proc_getpid());
}First, in order to load our C application without UB from the get go, we need to clear the BSS section of an
ELF file (which MOP2 uses as it’s executable format). We use _bss_start and _bss_end symbols for that, which
come from a linker script defined for user apps:
link.ld - linker script for user apps
ENTRY(_start)
SECTIONS {
. = 0x400000;
.text ALIGN(4K):
{
*(.text .text*)
}
.rodata (READONLY): ALIGN(4K)
{
*(.rodata .rodata*)
}
.data ALIGN(4K):
{
*(.data .data*)
}
.bss ALIGN(4K):
{
_bss_start = .;
*(.bss .bss*)
. = ALIGN(4K);
_bss_end = .;
}
}After that, we need to collect our application’s commandline arguments (like argc and argv in UNIX-derived
systems). To do that we use a proc_argv() syscall, which fills out a preallocated memory buffer with. The main
limitation of this approach is that the caller must ensure that enough space withing the buffer was allocated.
25 arguments is enough for pretty much all appliations on this system, but this is something that may be a little
problematic in the future.
After we’ve exited from main(), we just gracefully exit the application.
"Hello world" but from C this time
Now we can program our applications the "normal"/"human" way. We’ve gone over printing in assembly using the
debugprint() syscall, so let’s now try to use it from C. We’ll also try to do some more advanced printing
with (spoiler) uprintf().
Calling
debugprint() from C// Import `ulib`
#include <ulib.h>
void main(void) {
debugprint("hello world");
}That’s it! We’ve just printed "hello world" to the terminal! How awesome is that?
uprintf() and formatted printing#include <ulib.h>
void main(void) {
uprintf("Hello world %d %s %02X\n", 123, "this is a string literal", 0xBE);
}uprintf() is provided by Eyal Rozenberg (eyalroz), which originates from Macro Paland’s printf. This printf
library is super easily portable and doesn’t require much in terms of standard C functions and headers. My main
nitpick and a dealbreaker with other libraries was that they advertise themsevles as "freestanding" or "made for
embedded" or something along those lines, but in reality they need so much of the C standard library, that you
migh as well link with musl or glibc and use printf from there. And generally speaking, this is an issue with
quite a bit of "freestanding" libraries that you can find online ;(.
Printf rant over…
Error codes in MOP2 - a small anecdote
You might’ve noticed is that main() looks a little different from standard C main(). There’s
no return/error code, because MOP2 simply does not implement such feature. This is because MOP2 doesn’t follow the
UNIX philosophy.
The UNIX workflow consists of combining many small/tiny programs into a one big commandline, which transforms text into some more text. For eg.:
Example bash command (Linux) to get a name of /proc/meminfo field
cat /proc/meminfo | awk 'NR==20 {print $1}' | rev | cut -c 2- | revPersonally, I dislike this type of workflow. I prefer to have a few programs that perform tasks groupped by topic,
so for eg. in MOP2, we have $fs for working with the filesystem or $pctl for working with processes. When we
approach things the MOP2 way, it turns out error codes are kind of useless (or at least they wouldn’t get much
use), since we don’t need to connect many programs together to get something done.
Printing under the hood - intro to pipes
Let’s take a look into what calling uprintf() actually does to print the characters post formatting. The printf
library requires the user to define a putchar_() function, which is used to render a single character.
Personally, I think that this way of printing text is inefficient and it would be better to output and entire
buffer of memory, but oh well.
putchar.c
#include <stdint.h>
#include <system/system.h>
#include <printf/printf.h>
void putchar_(char c) {
ipc_pipewrite(-1, 0, (uint8_t *const)&c, 1);
}To output a single character we write it into a pipe. -1 means that the pipe belongs to the calling process, 0 is an ID into a table of process' pipes - and 0 means percisely the output pipe. In UNIX, the standard pipes are numbered as 0 = stdin, 1 = stdout and 2 = stderr. In MOP2 there’s no stderr, everything the application outputs goes into the out pipe (0), so we can just drop that entirely. We’re left with stdin/in pipe and stdout/out pipe, but I’ve decided to swap them around, because the out pipe is used more frequently and it made sense to get it working first and only then worry about getting input.
Pipes
MOP2 pipes are a lot like UNIX pipes - they’re a bidirectional stream of data, but there’s slight difference in the interface. Let’s take a look at what ulib defines:
Definitions for ipc_pipeXXX() calls
int32_t ipc_piperead(PID_t pid, uint64_t pipenum, uint8_t *const buffer, size_t len);
int32_t ipc_pipewrite(PID_t pid, uint64_t pipenum, const uint8_t *buffer, size_t len);
int32_t ipc_pipemake(uint64_t pipenum);
int32_t ipc_pipedelete(uint64_t pipenum);
int32_t ipc_pipeconnect(PID_t pid1, uint64_t pipenum1, PID_t pid2, uint64_t pipenum2);In UNIX you have 2 processes working with a single pipe, but in MOP2, a pipe is exposed to the outside world and anyone can read and write to it, which explains why these calls require a PID to be provided (indicates the owner of the pipe).
Example of ipc_piperead() - reading your applications own input stream
#include <stddef.h>
#include <stdint.h>
#include <ulib.h>
void main(void) {
PID_t pid = proc_getpid();
#define INPUT_LINE_MAX 1024
for (;;) {
char buffer[INPUT_LINE_MAX];
string_memset(buffer, 0, sizeof(buffer));
int32_t nrd = ipc_piperead(pid, 1, (uint8_t *const)buffer, sizeof(buffer) - 1);
if (nrd > 0) {
uprintf("Got something: %s\n", buffer);
}
}
}ipc_pipewrite() is a little boring, so let’s not go over it. Creating, deleting and connecting pipes is where
things get interesting.
A common issue, I’ve encountered, while programming in userspace for MOP2 is that I’d want to spawn some external
application and collect it’s output, for eg. into an ulib StringBuffer or some other akin structure. The
obvious thing to do would be to (since everything is polling-based) spawn an application, poll it’s state (not
PROC_DEAD) and while polling, read it’s out pipe (0) and save it into a stringbuffer. The code to do this would
look something like this:
Pipe lifetime problem illustration
#include <stddef.h>
#include <stdint.h>
#include <ulib.h>
void main(void) {
StringBuffer outsbuf;
stringbuffer_init(&outsbuf);
char *appargs = { "-saystring", "hello world" };
int32_t myapp = proc_spawn("base:/bin/myapp", appargs, ARRLEN(appargs));
proc_run(myapp);
// 4 == PROC_DEAD
while (proc_pollstate(myapp) != 4) {
int32_t r;
char buf[100];
string_memset(buf, 0, sizeof(buf));
r = ipc_piperead(myapp, 0, (uint8_t *const)buf, sizeof(buf) - 1);
if (r > 0) {
stringbuffer_appendcstr(&outsbuf, buf);
}
}
// print entire output
uprintf("%.*s\n", (int)outsbuf.count, outsbuf.data);
stringbuffer_free(&outsbuf);
}Can you spot the BIG BUG? What if the application dies before we manage to read data from the pipe, taking the pipe down with itself? We’re then stuck in this weird state of having incomplete data and the app being reported as dead by proc_pollstate.
This can be easily solved by changing the lifetime of the pipe we’re working with. The parent process shall allocate a pipe, connect it to it’s child process and make it so that a child is writing into a pipe managed by it’s parent.
Pipe lifetime problem - the solution
#include <stddef.h>
#include <stdint.h>
#include <ulib.h>
void main(void) {
PID_t pid = proc_getpid();
StringBuffer outsbuf;
stringbuffer_init(&outsbuf);
char *appargs = { "-saystring", "hello world" };
int32_t myapp = proc_spawn("base:/bin/myapp", appargs, ARRLEN(appargs));
// take a free pipe slot. 0 and 1 are already taken by default
ipc_pipemake(10);
// connect pipes
// myapp's out (0) pipe --> pid's 10th pipe
ipc_pipeconnect(myapp, 0, pid, 10);
proc_run(myapp);
// 4 == PROC_DEAD
while (proc_pollstate(myapp) != 4) {
int32_t r;
char buf[100];
string_memset(buf, 0, sizeof(buf));
r = ipc_piperead(myapp, 0, (uint8_t *const)buf, sizeof(buf) - 1);
if (r > 0) {
stringbuffer_appendcstr(&outsbuf, buf);
}
}
// print entire output
uprintf("%.*s\n", (int)outsbuf.count, outsbuf.data);
ipc_pipedelete(10);
stringbuffer_free(&outsbuf);
}Now, since the parent is managing the pipe and it outlives the child, everything is safe.
Hello World!
09 September 2025
This is a hello world post!
#include <stdio.h>
int main(void) {
printf("Hello World!\n");
return 0;
}Enjoy the blog! More posts are coming in the near future!
Older posts are available in the archive.